想要做一个在三米以内水深工作的航行器,因为要使用高自由度的架构,所以要使用无线通讯连接qgc和pixhawk,目前想在edge的基础上用无线数传模块代替电力载波,想请教一下这应该怎么搞?无线模块是应该接在树莓派还是飞控上呢?
想要做一个在三米以内水深工作的航行器,因为要使用高自由度的架构,所以要使用无线通讯连接qgc和pixhawk,目前想在edge的基础上用无线数传模块代替电力载波,想请教一下这应该怎么搞?无线模块是应该接在树莓派还是飞控上呢?
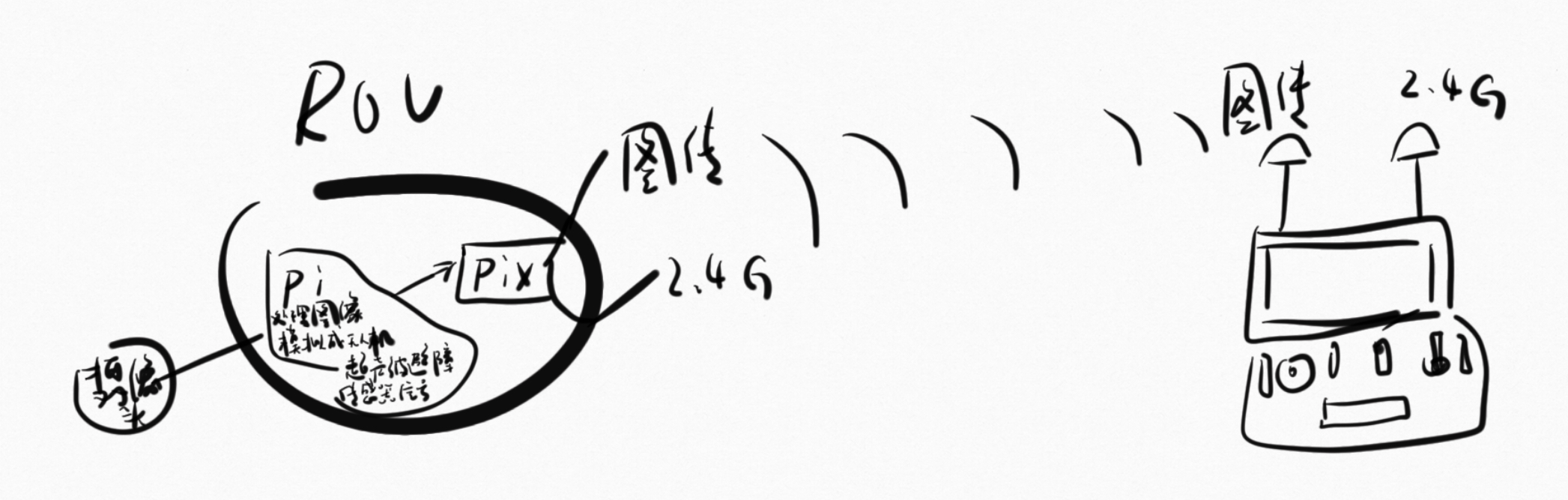
这个数传模块的作用是把pixhawk的usb端口无线连接到地面战电脑端。
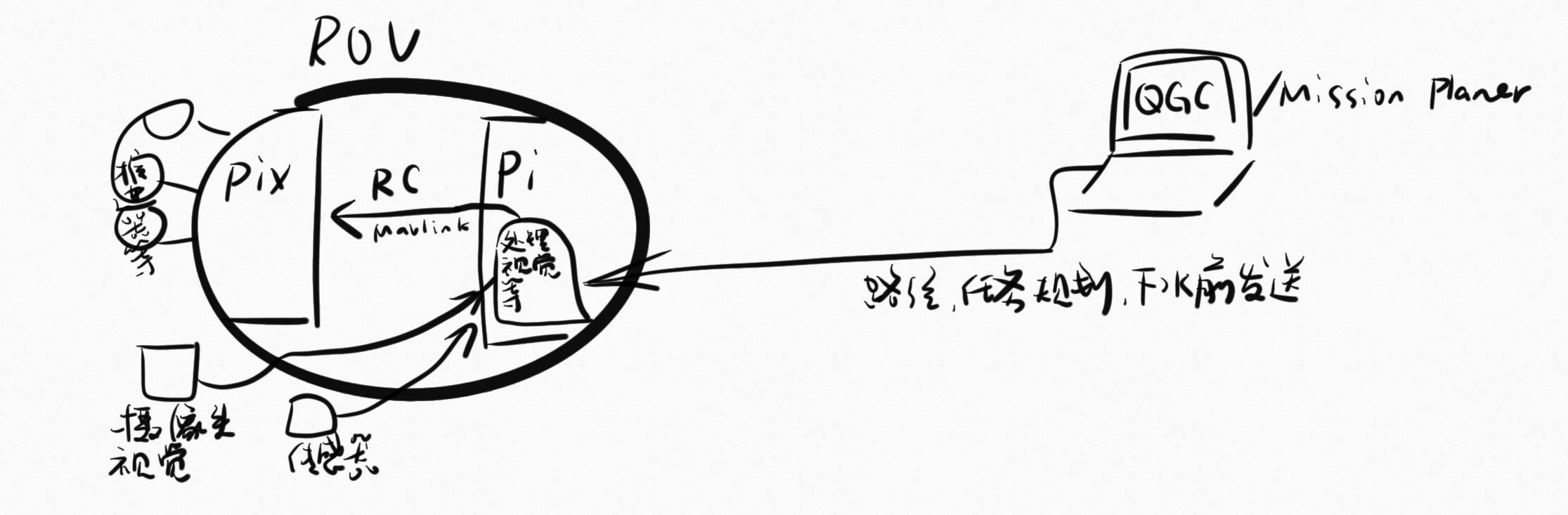
ardusub中的连接方法是pixhawk通过usb连接到树莓派,树莓派转发这个端口和视频信号,经过网口连接到电脑。因为距离和芯数的原因网口连接电脑经过电力载波模块。
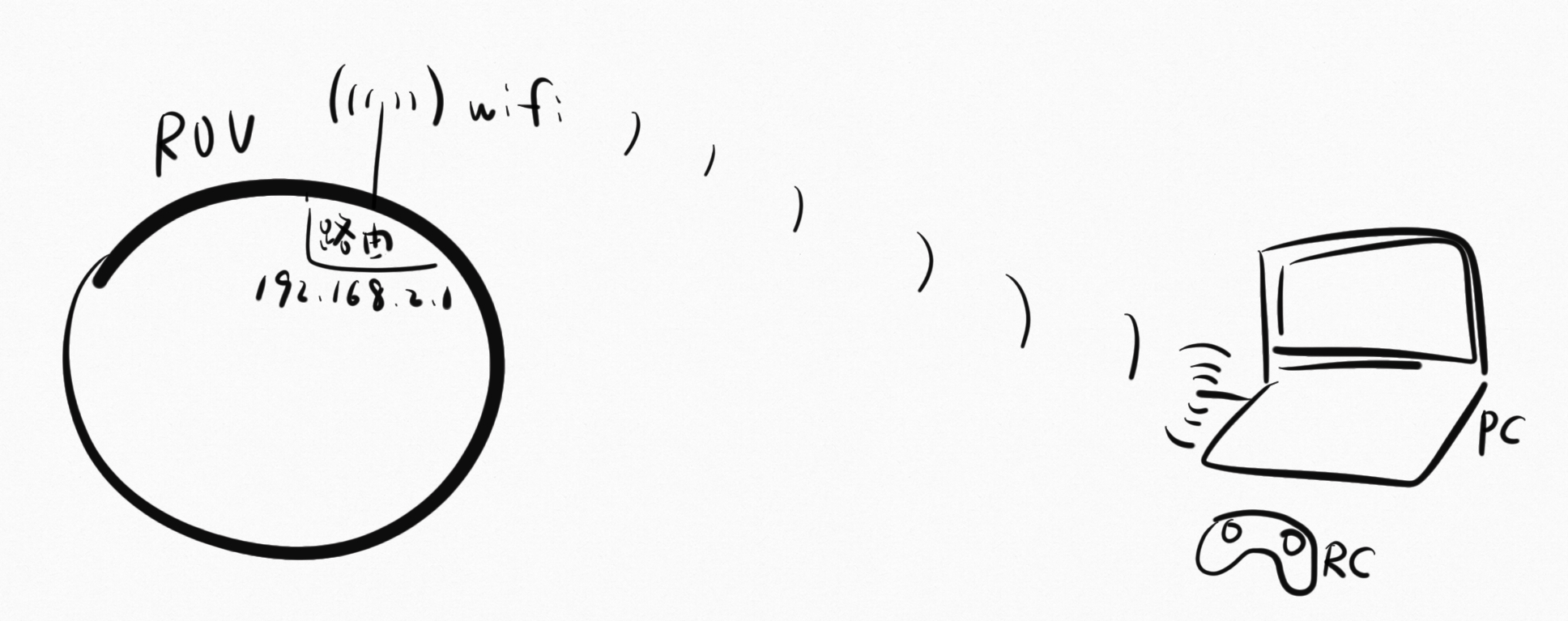
短距离水面的无线连接可以考虑直接把树莓派的网口接到高功率的路由器,电脑链接这个路由器的信号就ok了。
无线数传模块是传输串口数据,而电力载波模块和无线网桥都是通过网口传输数据?
很详实的解释!真的帮到忙了!
嗯,应该是这样的吧