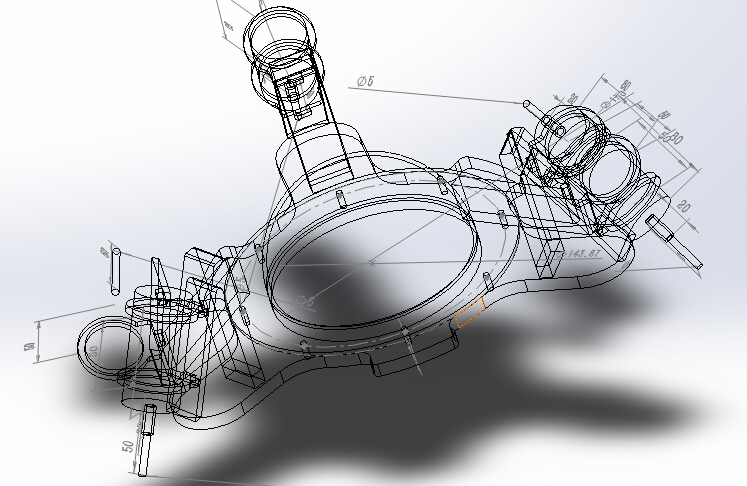
这个本来要做的,做了大的外壳,就放着了
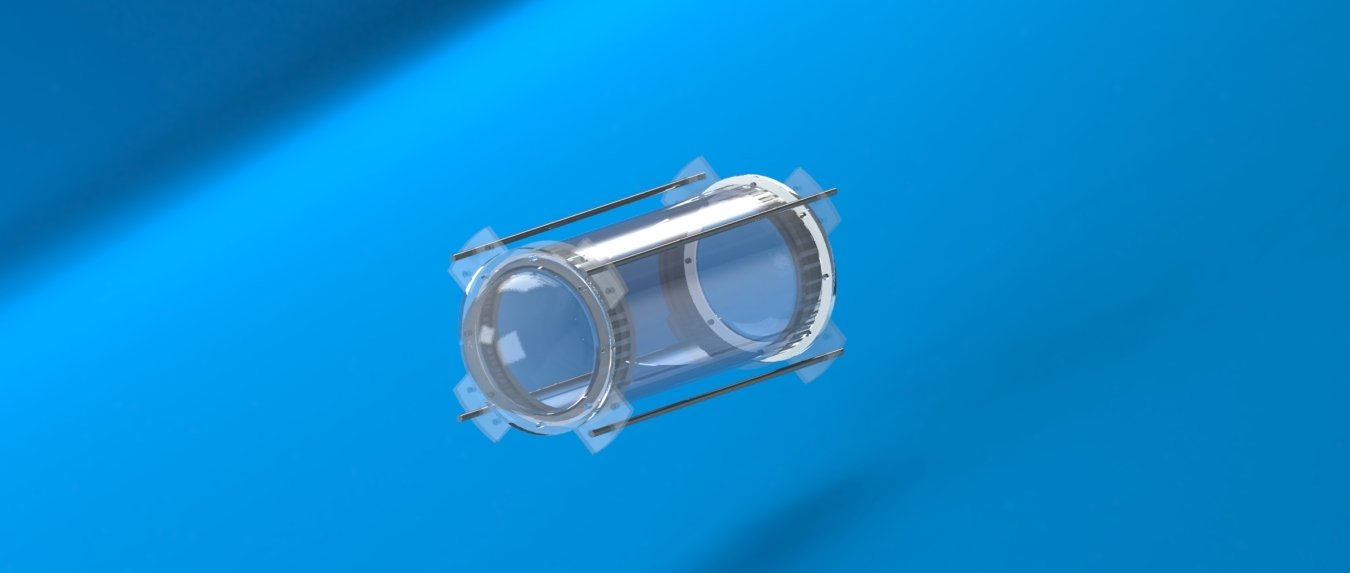
这个用农夫山泉的瓶子做了一个测试的,感觉可以
想做来着,可惜没时间。。。。。
分享给你们 希望能启发你们
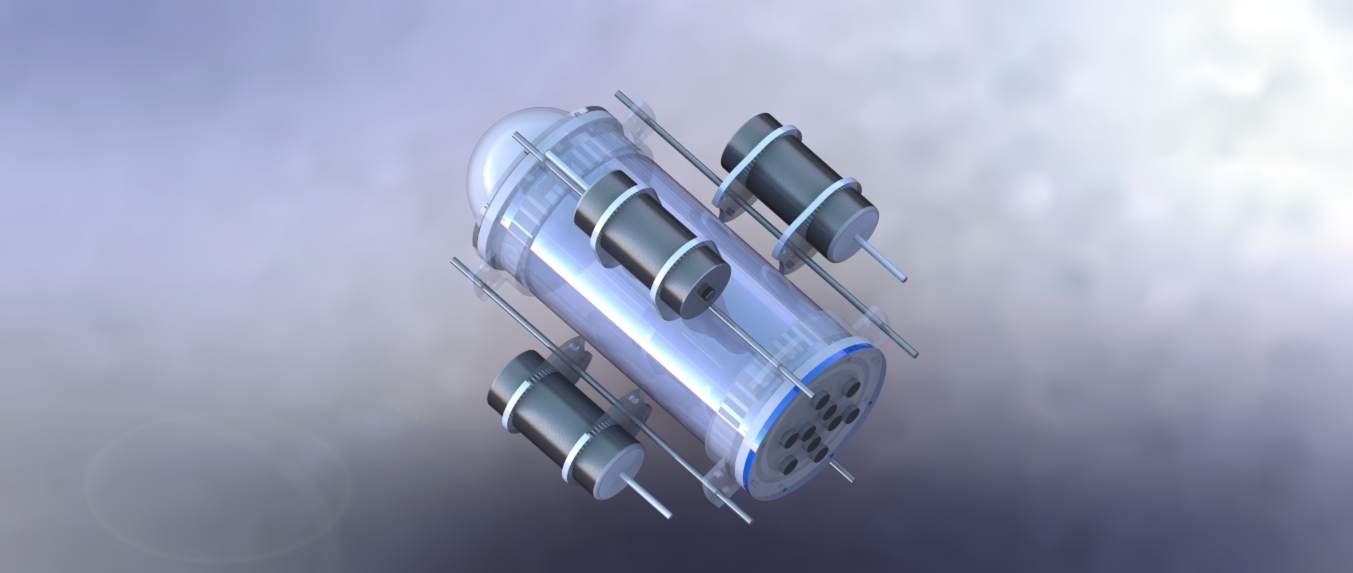
倒数第二个的动力配置看的不太懂:joy:
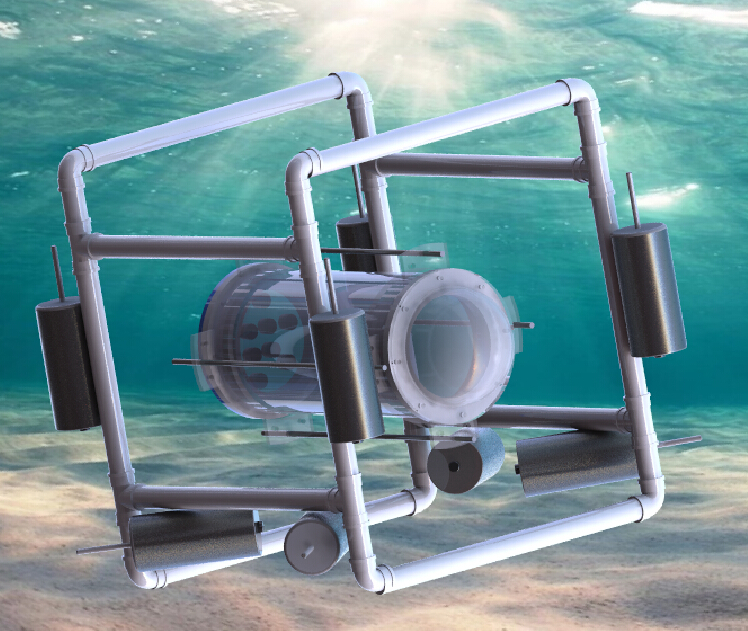
想法很棒啊,还有你这个效果图是怎么做出来的?相当之炫酷啊
使用solidworks软件,画好图后,使用渲染功能渲染
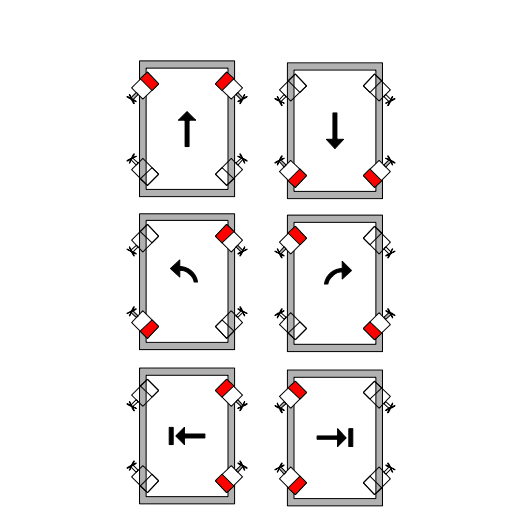
第一个我觉得好棒,不过垂向推不需要3个那么多吧
第一个想做来着。。。。竖直的3个推进器不是完全垂直的,是均匀分布在120°角度上,与中轴线有30°夹角,这样同时运动时,会有一个合力,让ROV更稳定,我是这样设想的
我以前毕业设计,运动都是4个推进器全部运作,前进后退什么都是4推进器,并不是只用其中2个。不然浪费推进器个数了
有没有原理图?好奇4个同时用的话是怎么个排布的。
我自己写一个一篇word文档,分析了物理模型,然后用MATLAB软件仿真的 ,仿真结果挺好的,我觉得可行而且比较好用。
真心希望您能给出一篇关于matlab仿真的帖子~
rov在水下是很稳定的,前提是重心要配置好, 不想无人机那样严格。
你的设计有没有保留下来原稿
应该还有solidwork的一些模型吧,还有用塑料瓶的实物