請問3跟4推進器,打下舵時3先轉.打上舵時4先轉要怎麼讓他們同步.調參數能做到嗎?謝謝
pixhawk里没有相关的设置,需要对电调的参数进行调整
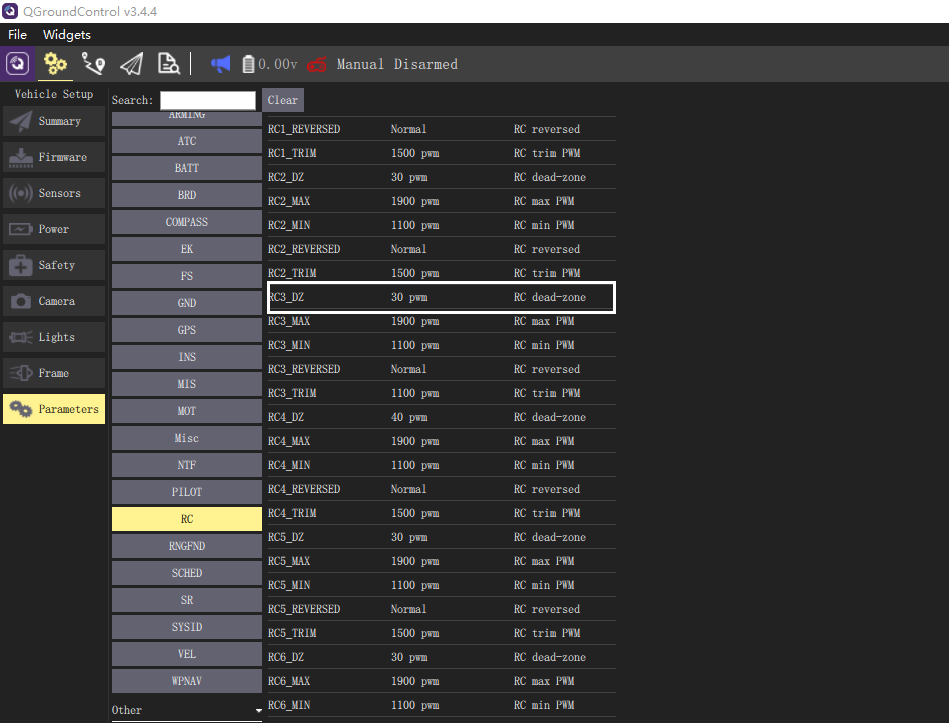
我在QGC的參數設定裡找到了解決的方法,我去RC裡面改中立點的值,目前還沒發現什麼副作用,用一段時間看看
除了中位,还可以设置死区,因为电机一般都会有出厂的推力误差,这样可以基本解决推进器一致性不好的问题。
死區的意思是甚麼,有其他的解釋嗎?
死区在哪里设置?
parameters->Asvanced->RC->RCx_DZ