质询一下几个问题 1: ArduSub固件螺旋桨摆放必须遵循官网提供的这5种布置方法吗?
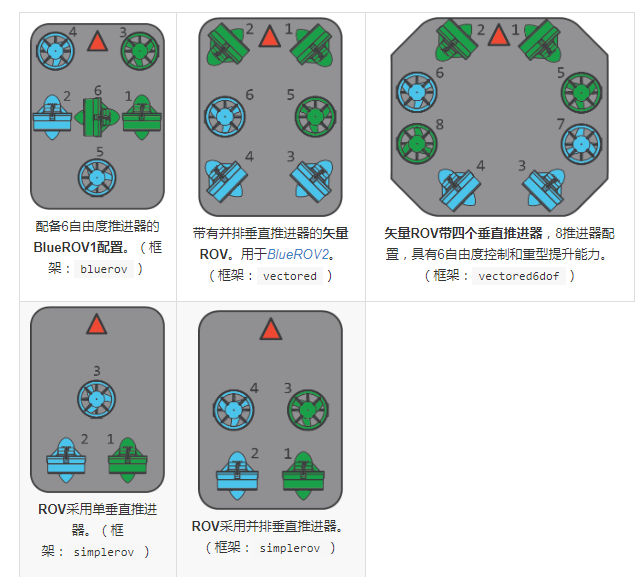
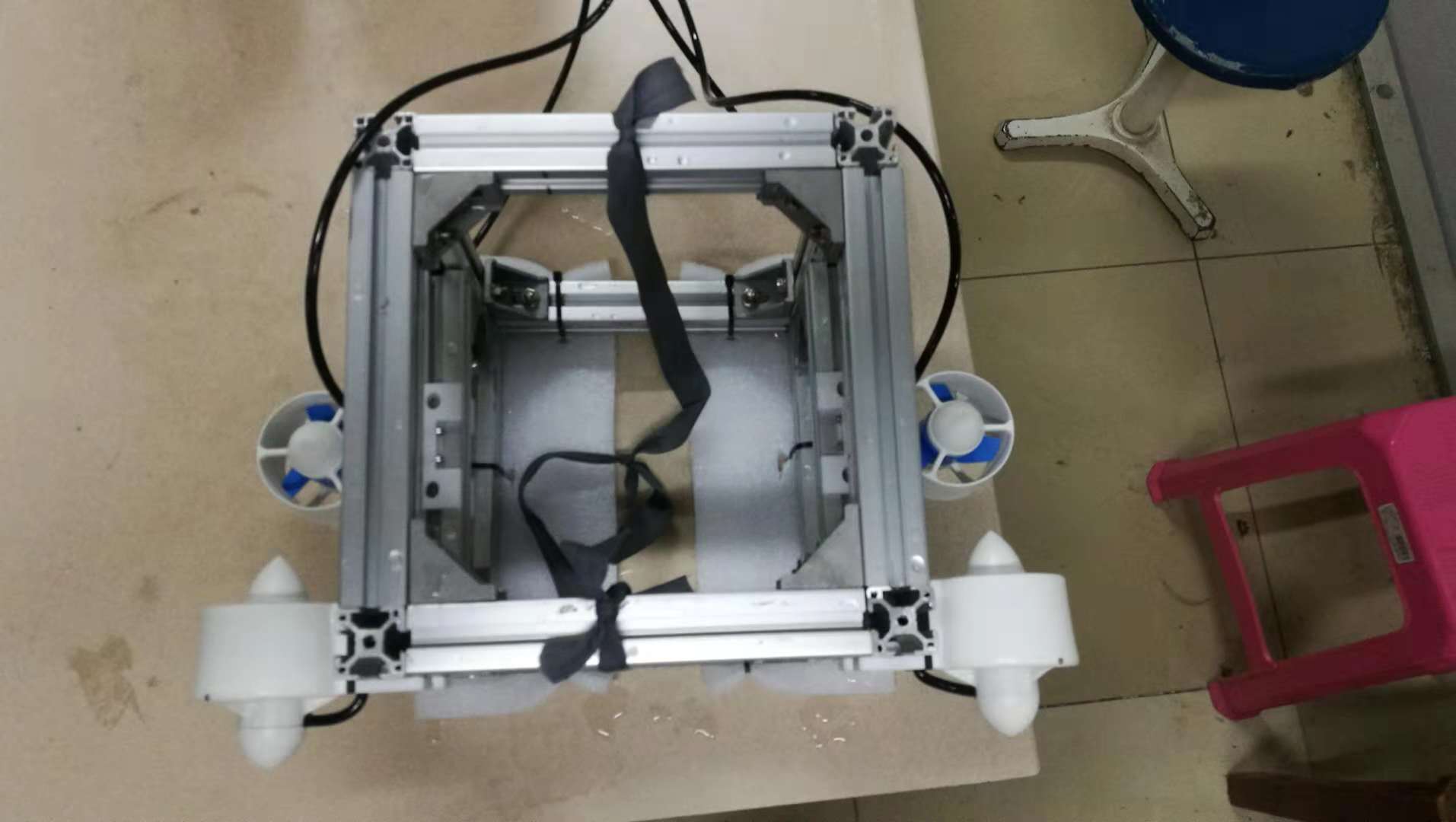
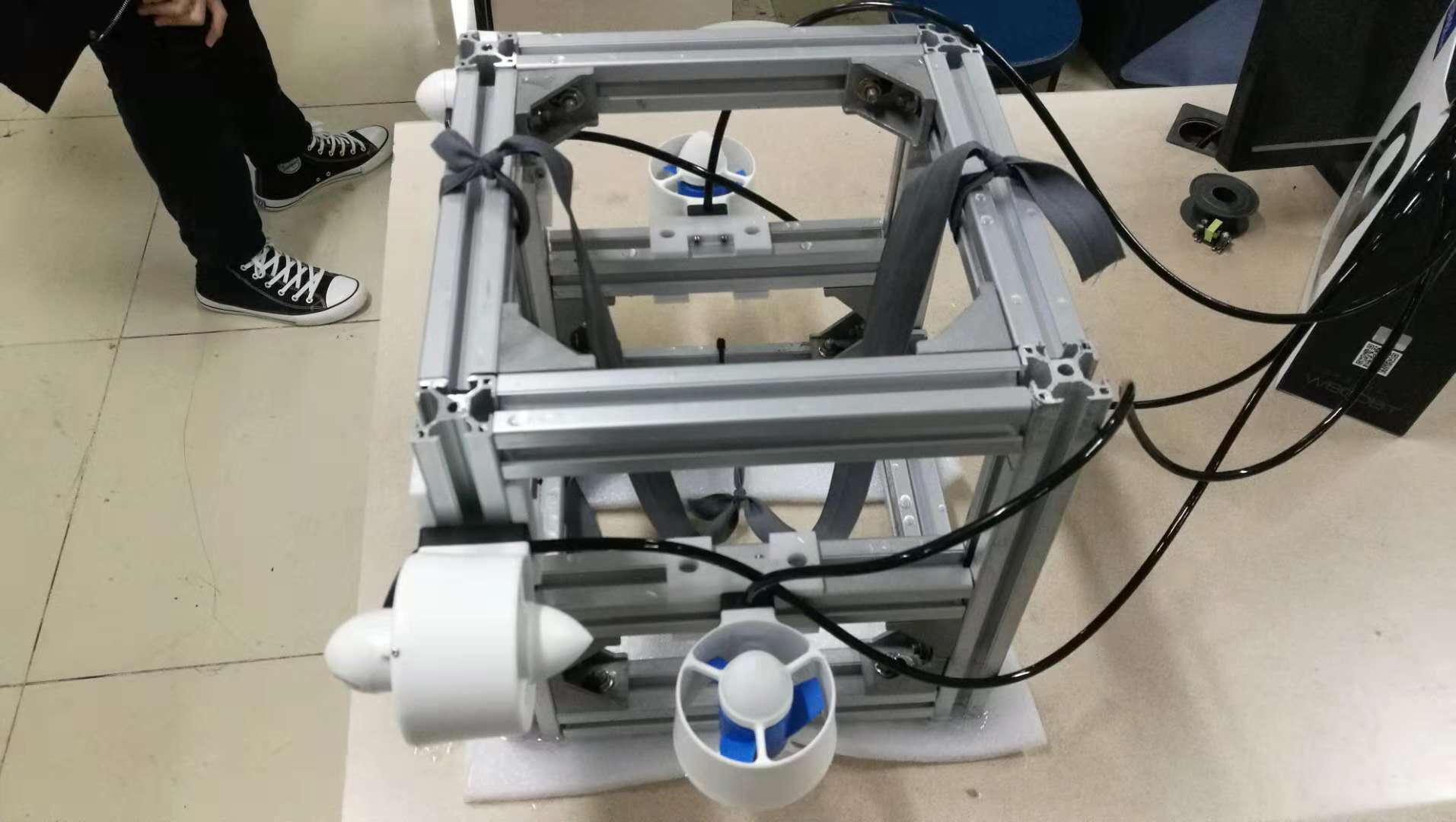
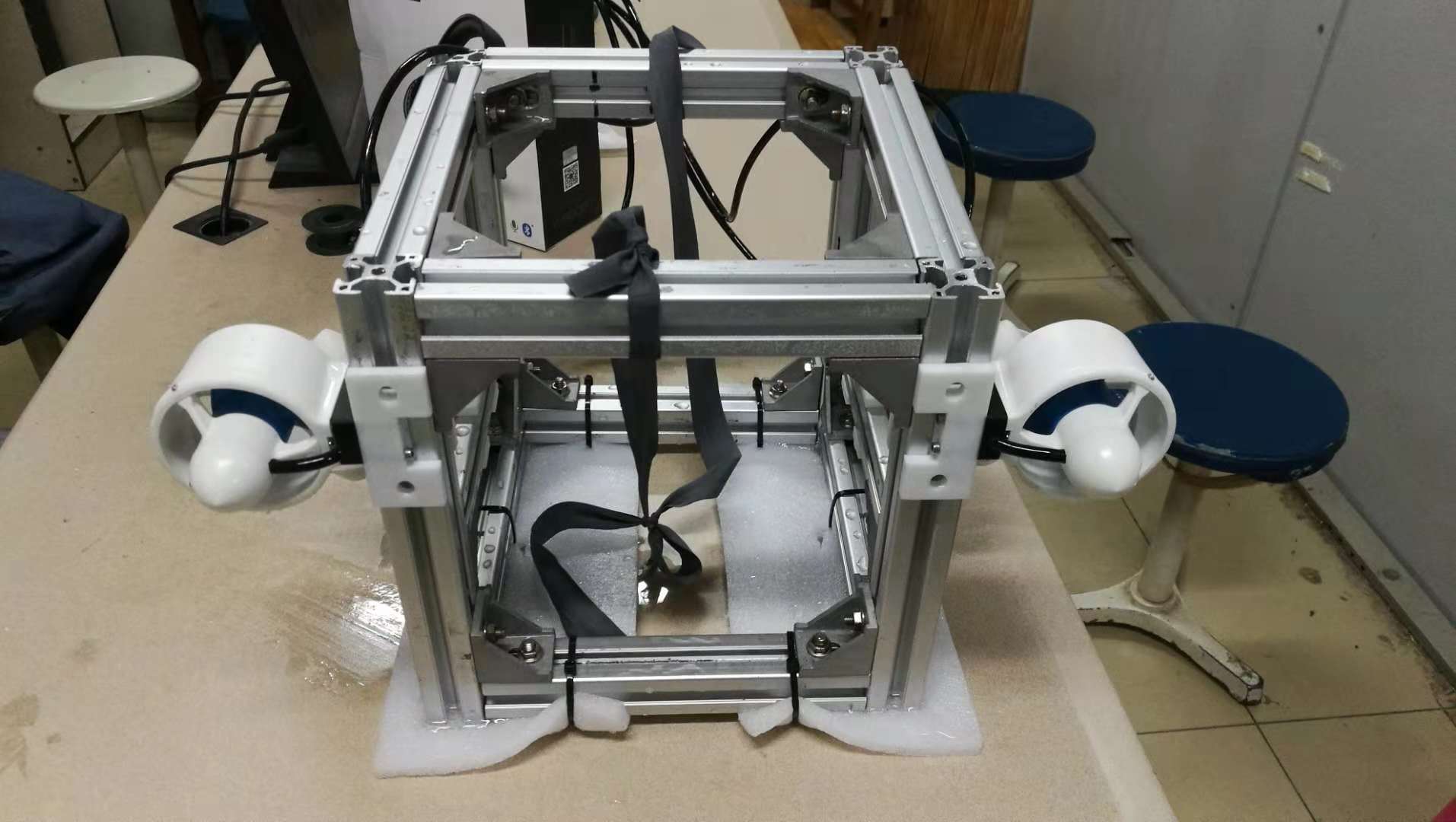
我目前的样机这样摆放你看可以吗?
2:ArduSub这个固件只支持一种控制方案吗(遥控器连接电脑,电脑通过以太网连接树莓派,树莓派连接飞控)?可不可以直接用PPM信号遥控器遥控飞控呢?
质询一下几个问题 1: ArduSub固件螺旋桨摆放必须遵循官网提供的这5种布置方法吗?
2:ArduSub这个固件只支持一种控制方案吗(遥控器连接电脑,电脑通过以太网连接树莓派,树莓派连接飞控)?可不可以直接用PPM信号遥控器遥控飞控呢?
ardusub默认的是图上的几种配置,如果自定义配置的话,可以在customized-fram里面配置之后再编译使用自己的推进器布局配置,可以参考我们的手册里面的操作流程,看到过有人用遥控器连接控制的应该可以。
手册可以发一下吗?
还有 我试过使用PPM和SBUS和飞控通信 都不行 这是怎么回事 可以回答一下吗
好的 有机会一定要试一下 成功的话 可以实现另外一种控制 但是就怕 你太忙 没时间弄:thinking:
确认了。
Ardusub确实不支持连接接收机不能像ardurover arducopter一样用,你最终想要实现什么?脱离电脑直接用遥控器控制吗为什么?你想做什么效果?可以讲一讲给你出出主意。
如果不是这样的话,可以用ppm转usb的模块把你的rc遥控器转换成joystick连接到电脑。
另外水是无线电波的不良介质,除非把天线伸高,不过水面也会吸收衰减信号。
所以情理之中,在ardusub的代码中,sbus/rcin那一部分几乎都被删减,遥控器信号都是从电脑到树莓派再发送到pix,或者树莓派脚本发送指令给pix。
谢谢老板的回答 对的 我初步的想法是只使用遥控器 脱离电脑直接控制飞控 你这么一说的话 这个方案就不行了 我想知道遥控器的PPM信号经过树莓派传给Ardusub固件的是什么信号(也就是Ardusub固件能接受什么样的遥控信号) 如果知道这个的话 是不是可以直接省去电脑这个环节了甚至是树莓派也可以省去 我也是打算使用有线的 不使用无线传输 还有一个问题,Ardusub固件输出的数据流在上位机中显示的信息,这个数据流有没有资料 我的目的是想自己制作一个量身打造的上位机软件 只需要显示一些数据和视频图像即可 所以想知道飞控输出的数据流信息 希望楼主批评指正 ![]()
既然有线而且要在电脑显示信息,为什么要跳过电脑遥控呢。
给到pix的是mavlink协议的指令,关于上位机显示就看一看ardusub和QGC的源码吧。
請問ppm转usb的模块要取去哪買謝謝
楼主你好 我想问一下 你按照手册里改推进器布置成功了吗?
你好,想更改推进器配置,但是您给的手册链接404了,能给提供一下嘛,谢谢!