![]() (以下所有内容不代表最终产品介绍,仅表示开发进度)
(以下所有内容不代表最终产品介绍,仅表示开发进度)
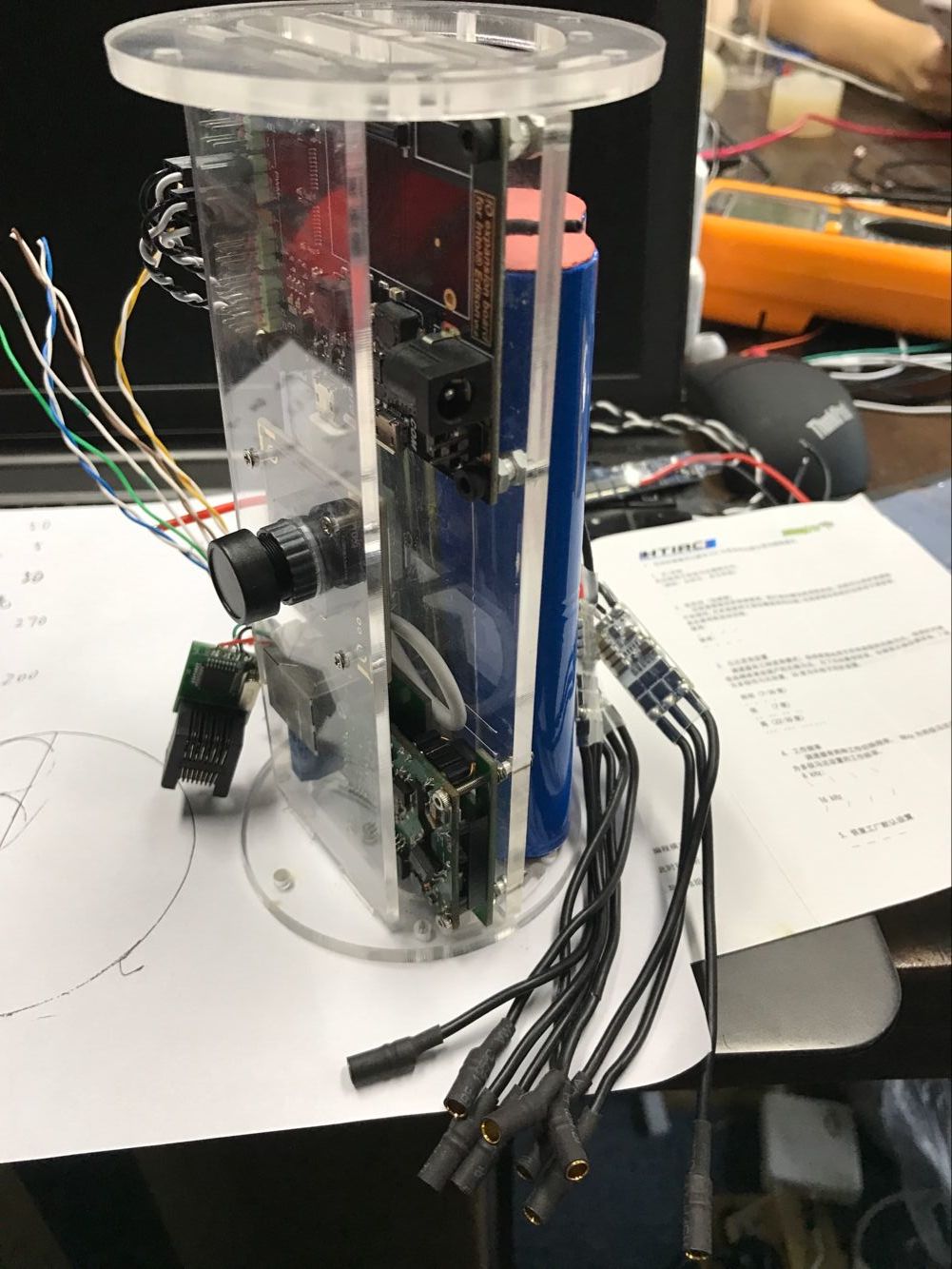
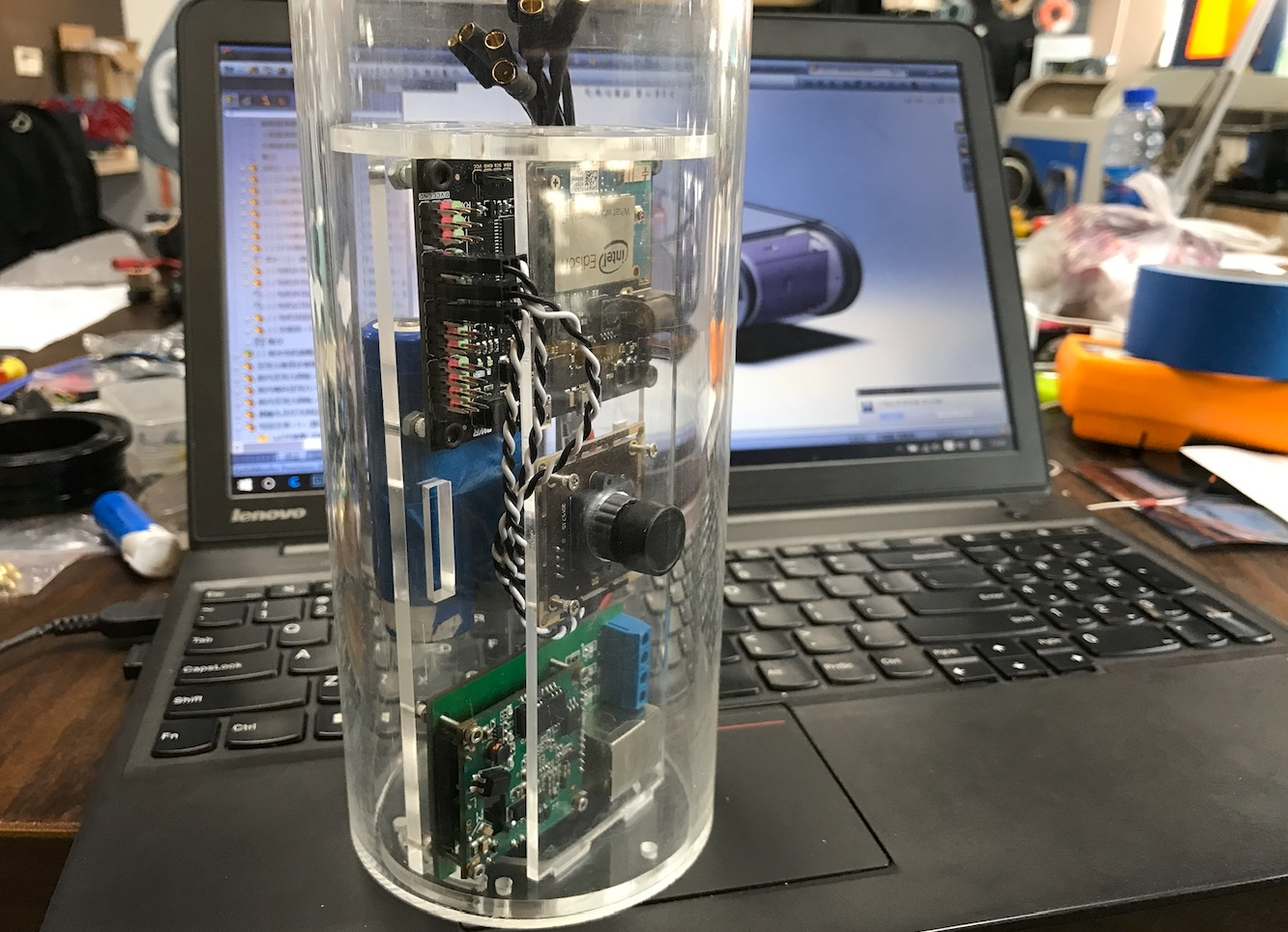
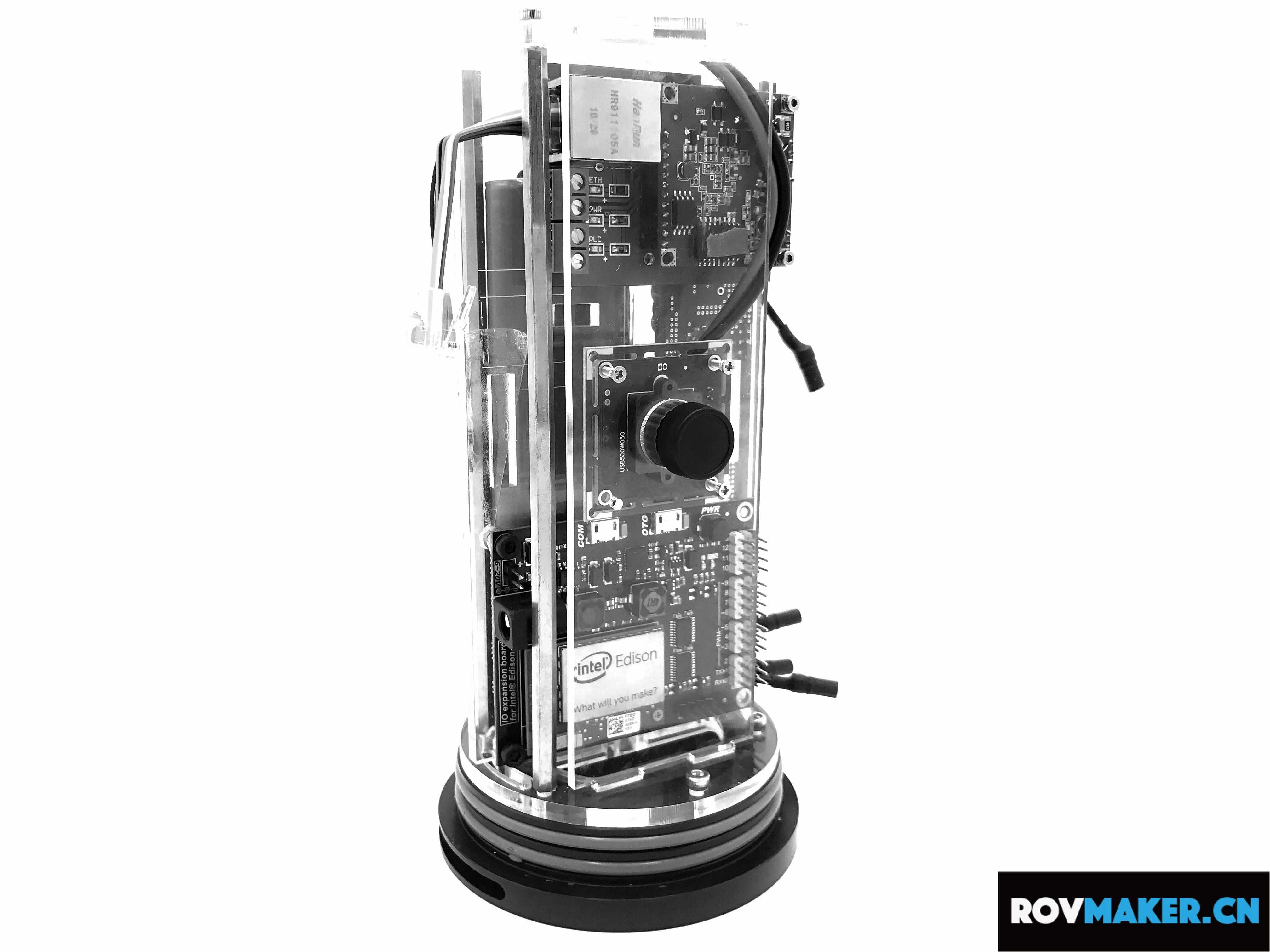
我们正在开发一款五千售价内的三个电机版本的ROV套件,使用intel edison主控。
载波模块最长三百米线缆长度(已上架淘宝),整体一百米耐压深度。
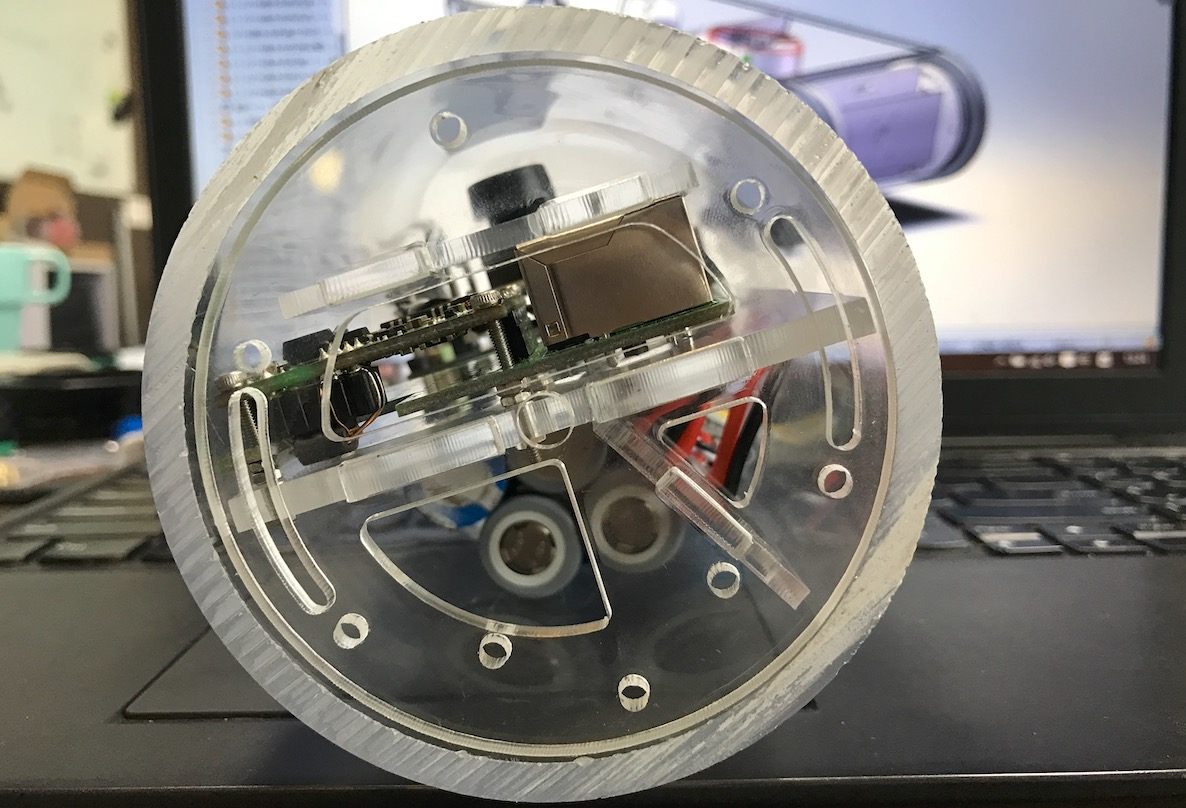
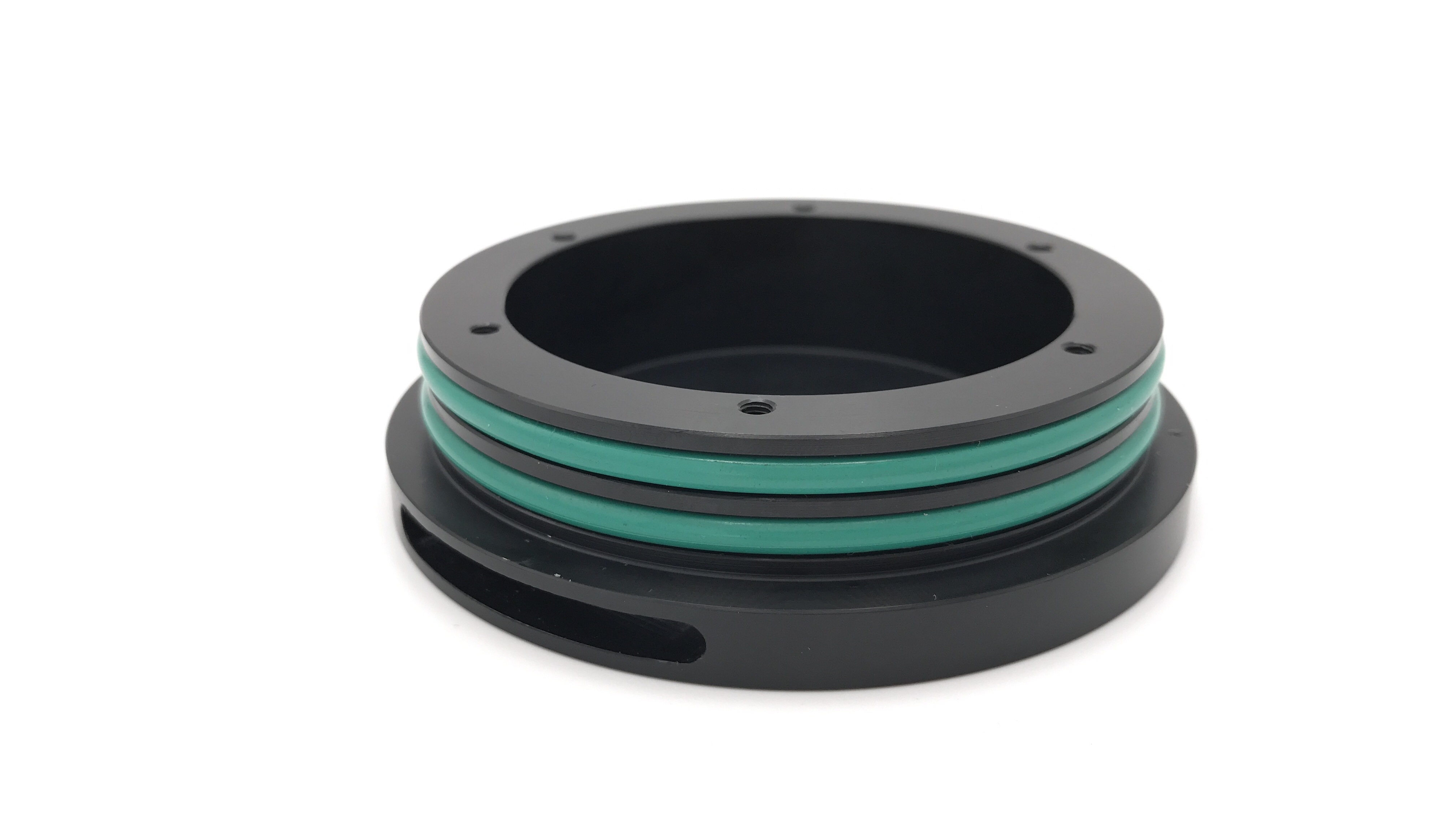
亚克力折弯机体配合亚克力密封舱,密封舱两端机加工法兰与氟胶O型圈配合:

打印和切割亚克力试一下效果:
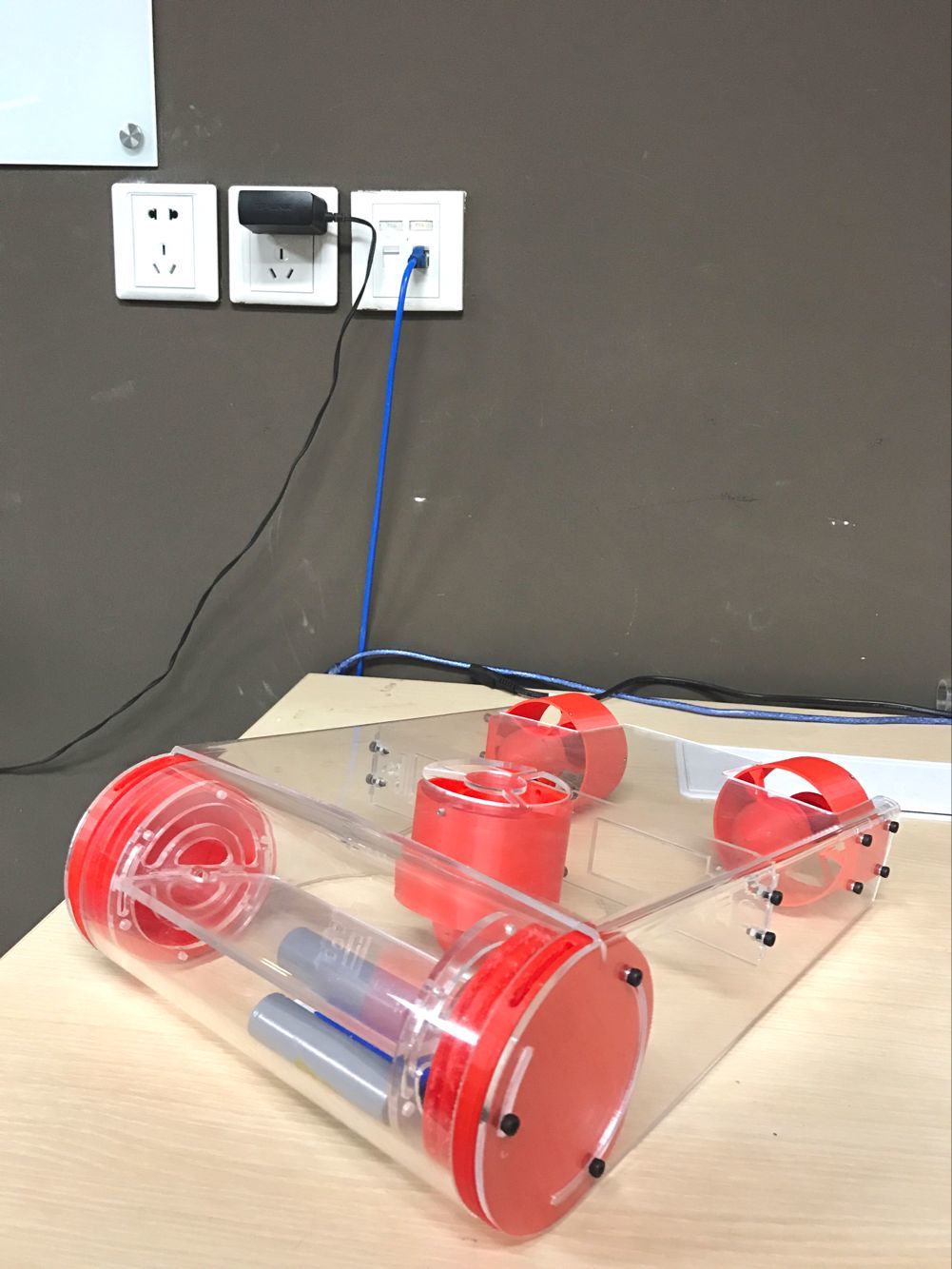
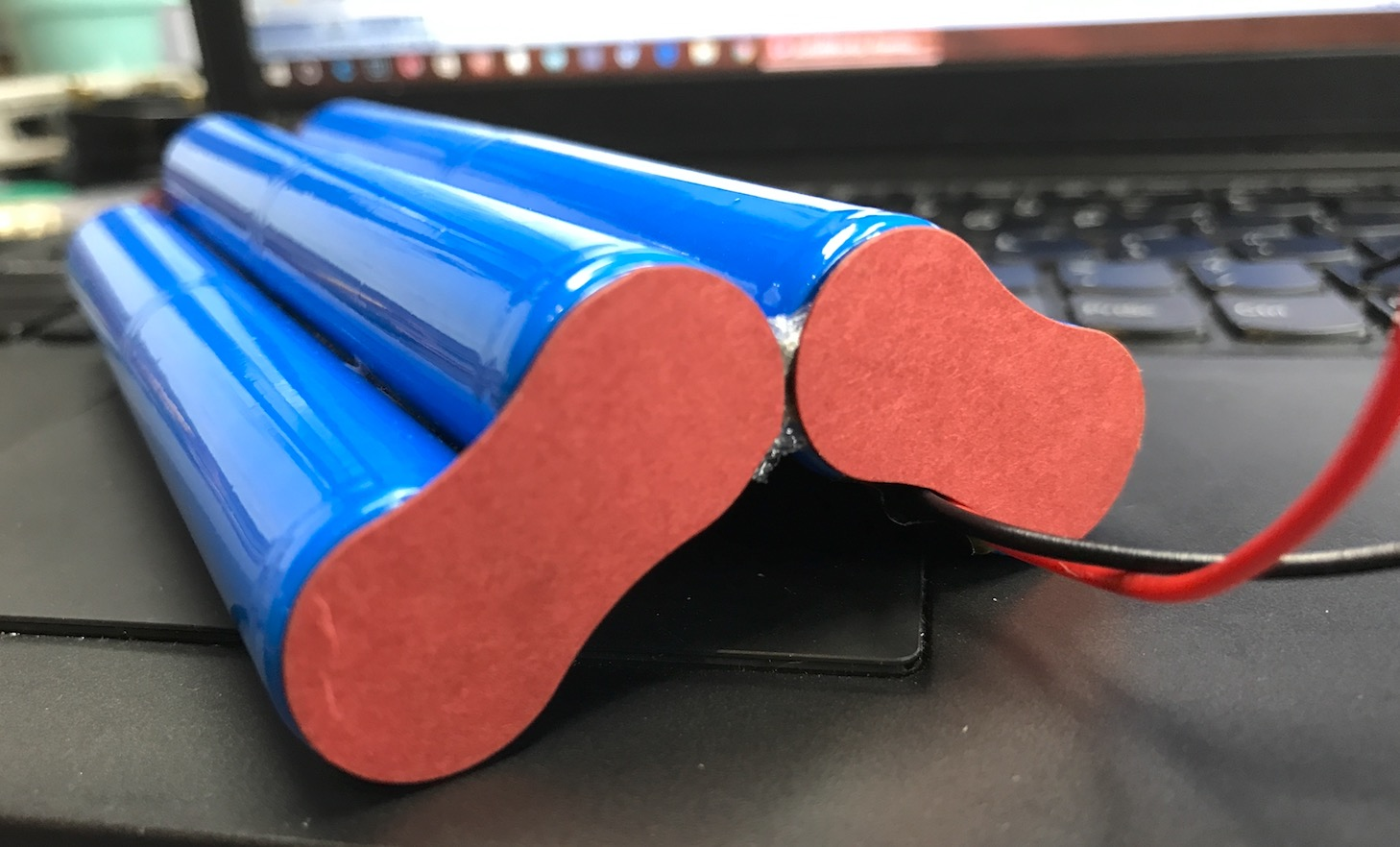
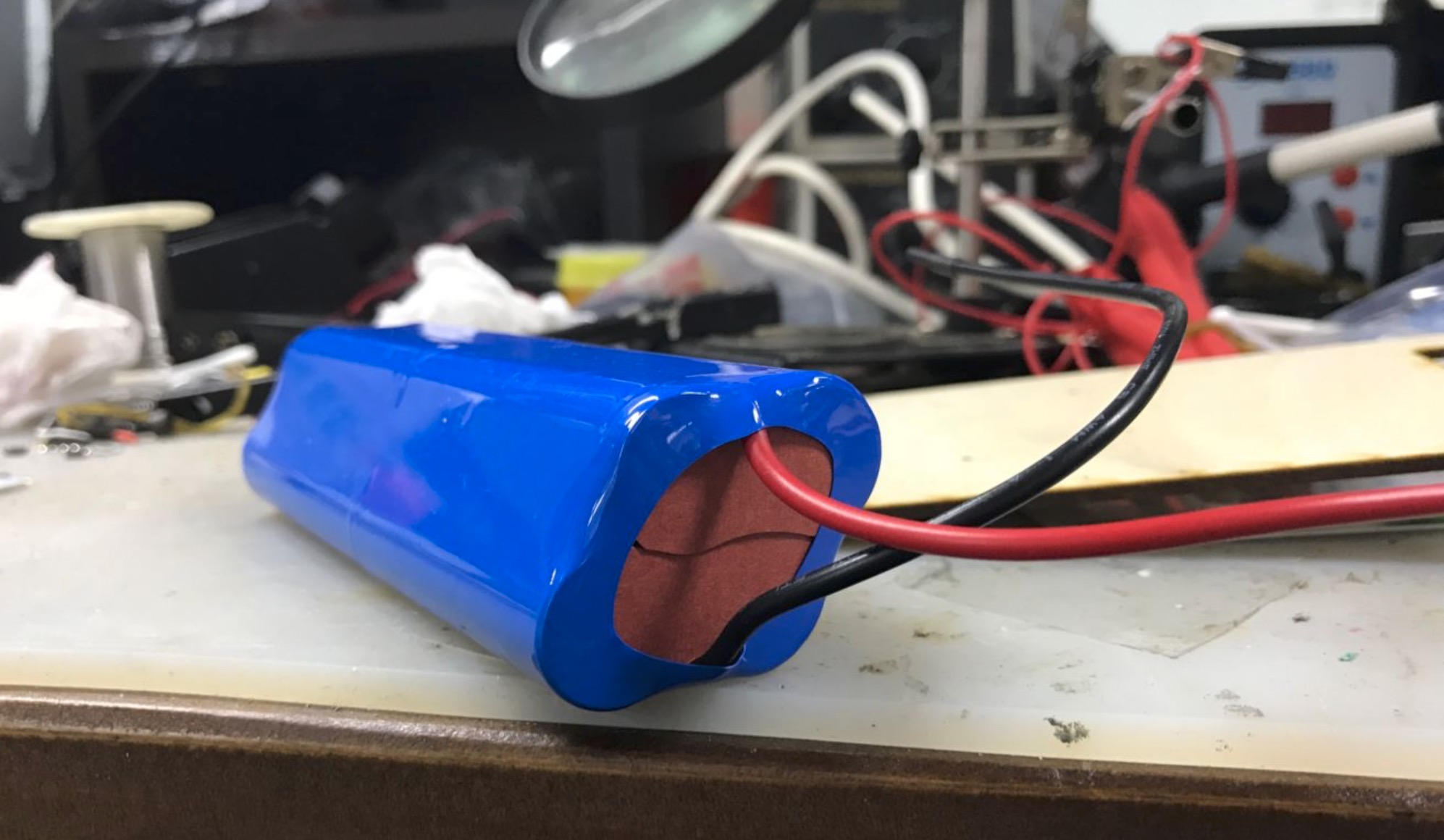
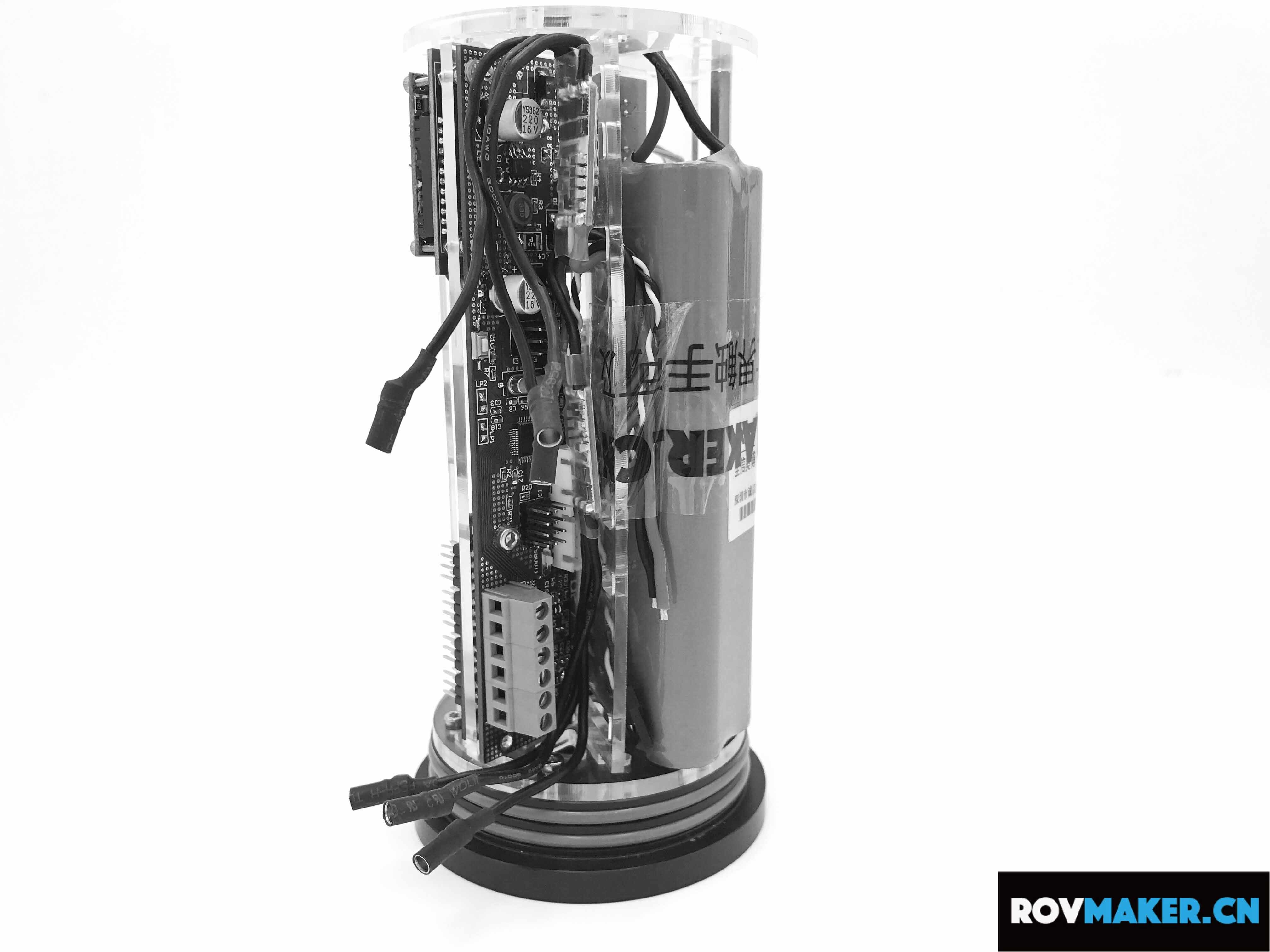
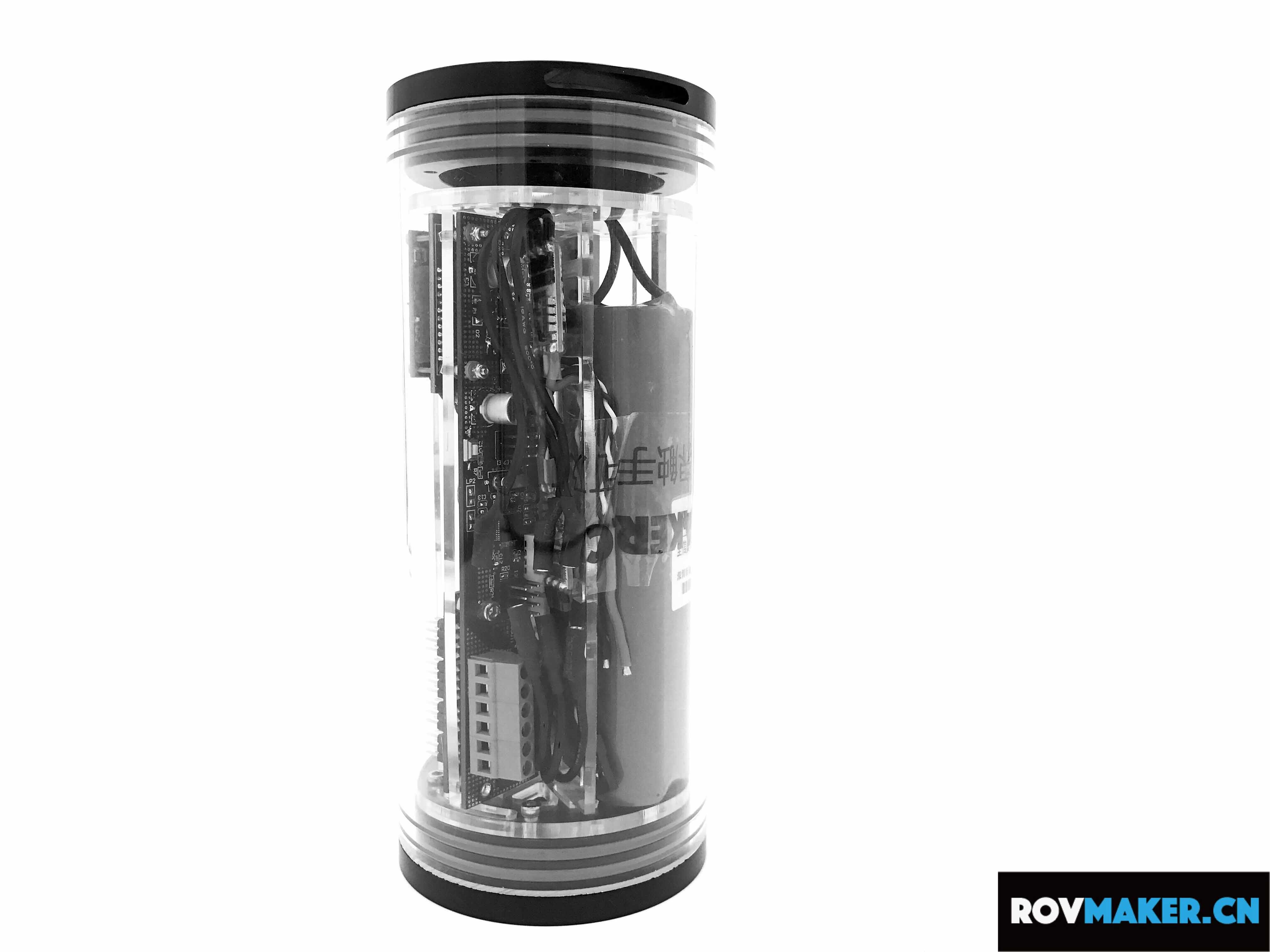
舱内初步结构,正在配合定制的电池进行调整,加工法兰和长铜柱。
![]() (以下所有内容不代表最终产品介绍,仅表示开发进度)
(以下所有内容不代表最终产品介绍,仅表示开发进度)
我们正在开发一款五千售价内的三个电机版本的ROV套件,使用intel edison主控。
载波模块最长三百米线缆长度(已上架淘宝),整体一百米耐压深度。
亚克力折弯机体配合亚克力密封舱,密封舱两端机加工法兰与氟胶O型圈配合:
非常不错,支持支持
18650电池放电电流能够用吗?? 无刷电机可是电老虎啊
18650是sony定的型号标准,18表示直径为18mm,65表示长度为65mm,0表示为圆柱形电池。
18650和容量与放电倍率无关,放电倍率20c的也有的。
用航模的锂聚合物电池也可以吧 就是比较贵
尝试了各种型号电池,用18650平行四边形分布空间利用率最高
耐压100米是怎么测的?没有冒犯的意思,我只是表示怀疑。还有300米电力猫传输速率是多少?会不会很卡?
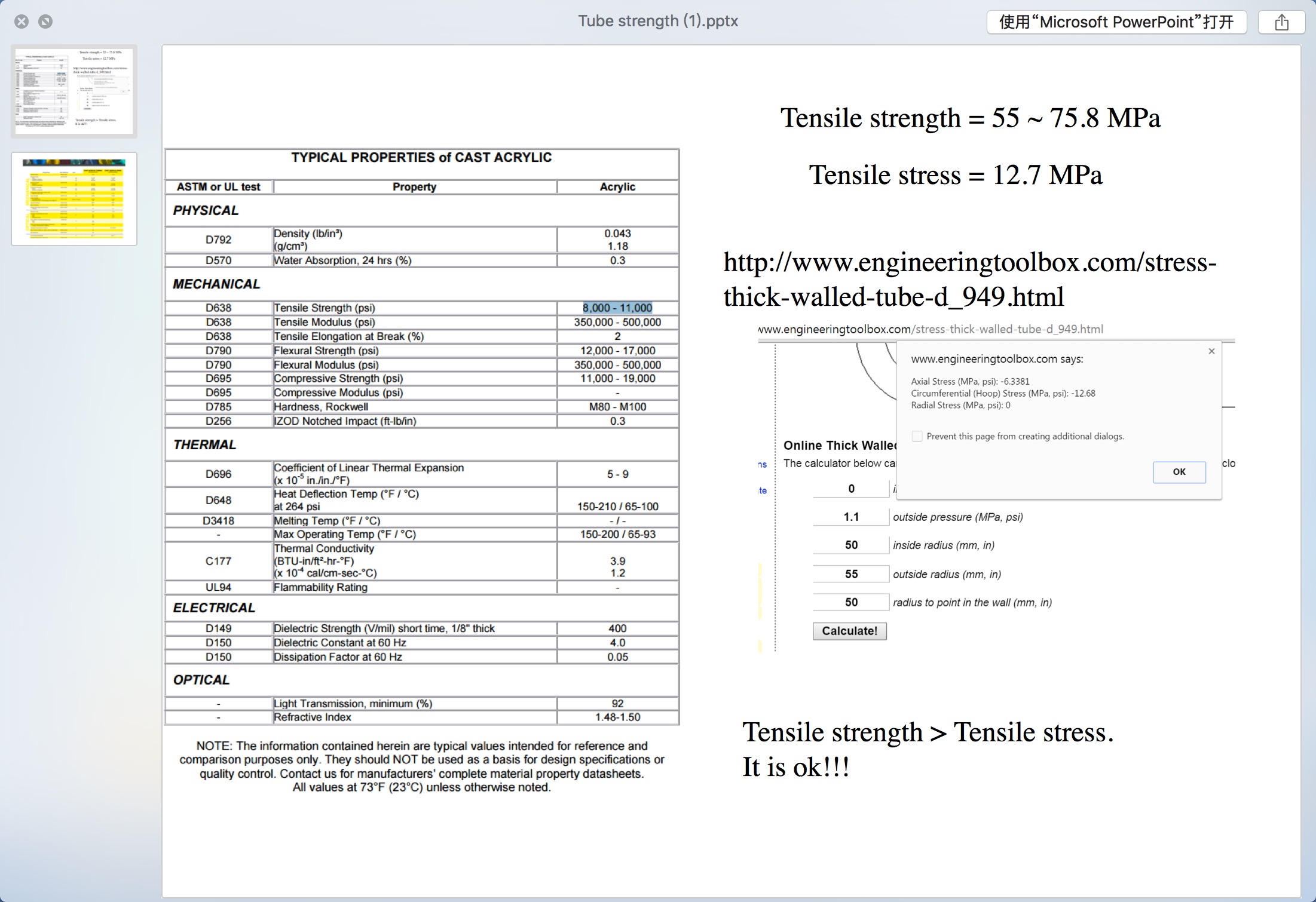
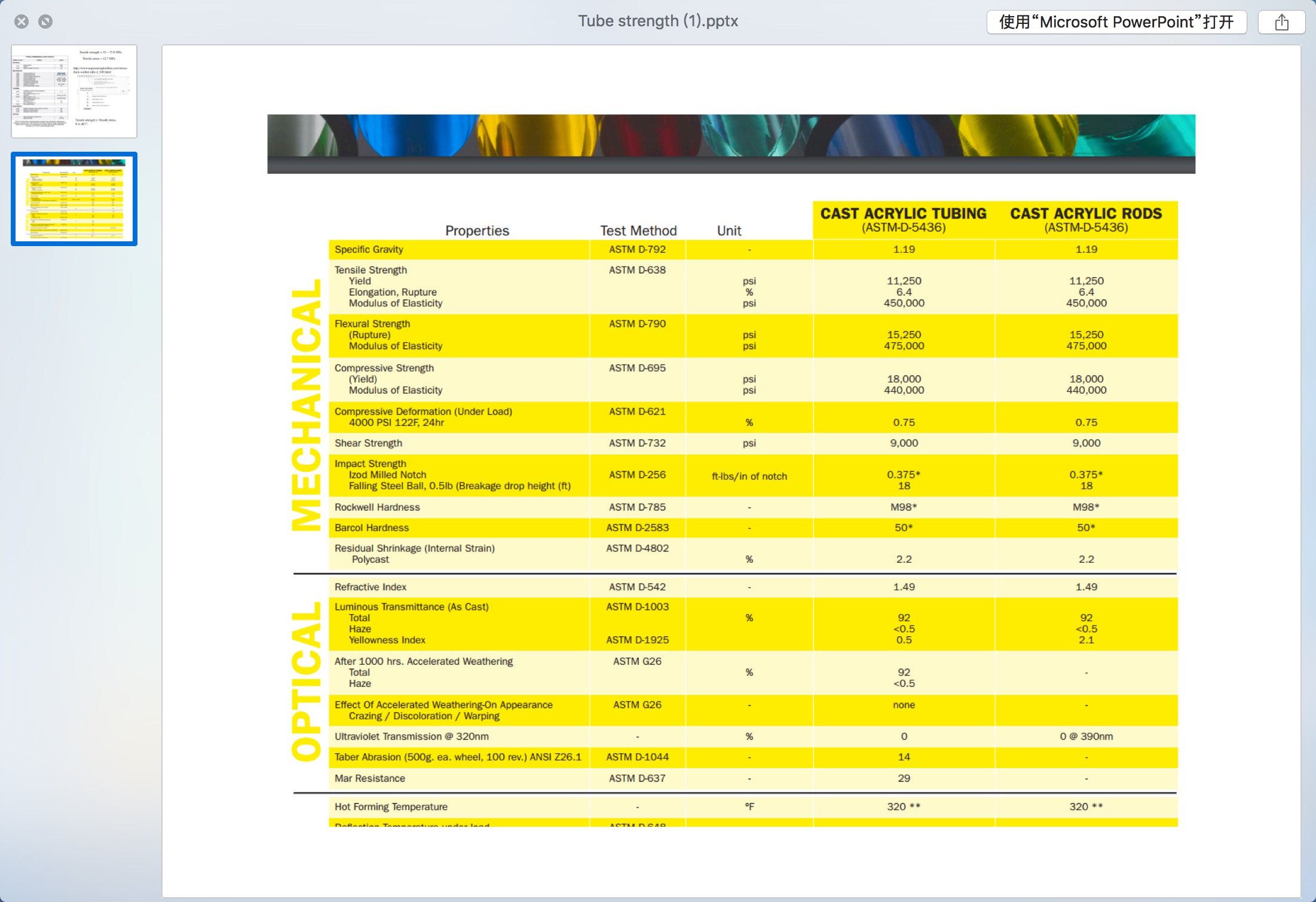
谢谢。亚克力本身不是瓶颈。那两个硅胶圈才是,我估计它们承受不了50米水压下半小时。当然我希望它们可以。
我单用100m网线测了下,树莓派传一张640x480的jpeg图像需要35ms,也就是刚好约30帧每秒,不知你们用的控制板是哪种?
用的是intel edison作为主控,stm32协处理
期待看到成品,另外,你们这个是开源吗?
嗯嗯,是开源项目,会持续更新进度
具体耐压你测试了吗?不能只靠算,单纯算的不是很准,考虑到加工过程中的应力集中,会有一定的差距。
//所有接线线还未连接,需要更改一些过线孔的尺寸。(胶带和某些安装布局只是临时的)