哪一个是上升,前进,转弯对应的英文(yaw,pitch,roll等等)是什么?我测试发现都对不上。
yaw,pitch,roll 是 偏航 俯仰 横滚
图片解释:
http://ocg6jvu8h.qnssl.com/uploads/default/original/1X/a7ca1ef36a71687d934b9e2f5a89c69b5905c11b.png
手柄的建议操作映射配置:
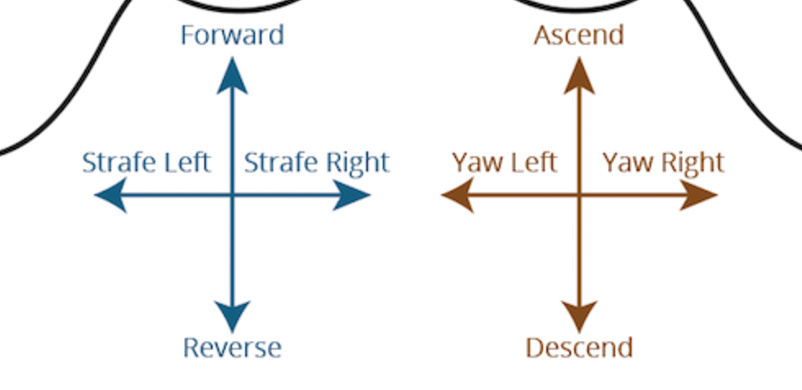
forward前进 reverse后退 strafe left 左平移 strafe right 右平移
ascend上浮 descend下潜 yaw left 左自旋 yaw right 右自旋
在校准手柄的时候按照校准提示和图片,校准对应位置的摇杆。
Throttle: right stick up/down
Yaw: right stick right/left
Roll: left stick right/left
Pitch: left stick up/down
(比如:校准显示throttle,这个时候校准右边的摇杆分别最上和最下)
发贴别都是问问题啊,放一些图片,也多让大家看到你的成果啊。
遥控器手柄的按键设置说明:
手柄的按键可以配置每个对应为不同的功能,下拉后可选功能的解释如下。
none: 什么也不做,按键无功能。
shift: 相当于电脑的shift键,按下的同时按其他按键,触发按下的按键所对应的shift功能。
arm_toggle:切换arm和disarm状态。
arm: 解锁rov
disarm: 锁定rov
gain_toggle: 切换最大和最小的输出增益敏感度
gain_inc: 增大输入增益敏感度
gain_dec: 减小输入增益敏感度
trim_roll_inc: 向右减小 roll 姿态
trim_roll_dec: 向左减小 roll 姿态
trim_pitch_inc: 向前减小 pitch 姿态
trim_pitch_dec: 向后减小 pitch 姿态
input_hold_toggle: 保持摇杆当前状态的输出
roll_pitch_toggle: 切换摇杆 roll/pitch 和 forward/lateral 控制输入
relay_1/2/3_on: 通道1/2/3高电平输出
relay_1/2/3_off:通道1/2/3低电平输出
relay_1/2/3_toggle:通道1/2/3切换高低电平输出
servo_1/2/3_inc: 增大 Aux1/2/3 输出 50 pwm
servo_1/2/3_dec: 减小 Aux1/2/3 输出50 pwm
servo_1/2/3_min:设置 Aux1/2/3 输出到SERVO9_MIN 的最小pwm值
servo_1/2/3_max: 设置 Aux1/2/3 输出到SERVO9_MIN 的最大pwm值
servo_1/2/3_center: 设置 Aux1/2/3 输出到SERVO9_MIN 的pwm中值