能提供Ardusub-Raspbian的镜像吗,树莓派和pix连接上了之后用网线和电脑连接,之后该怎么办呀
看我们的开架式开源通用手册
请问用树莓派和飞控控制rov是不是不用自己写程序?是不是只需要调试就好?
是的,不需要编程,调参即可
地面站软件有中文版的吗? 是否可以对机器人的姿态进行指定角度的控制?
中文版好像没有,没太大意义,英文的很好。
指定姿态控制是可以的,自稳模式定深模式等。
机器人倾斜一定角度后可以保持吗?
要看你的推进器布局,动力结构支持的话就可以保持。
有两种方式一种是遥控器指令保持持续输出相当于手动模式,还有就是姿态自稳模式。
手动模式就是一直控制手柄?姿态自稳需要事先编程吧
不需要编程,本来就提供这些操作模式。
你可以看一下手册 :
1 个赞
请问有飞控和树莓派的开源程序吗?
github搜索一下就有了
飞控的14个PWM通道如果都扩展了的话在地面站软件里都可以进行直接控制吗?还是需要二次开发?
都可以,只需要调参配置。但是如果你的控制方式有很多模拟量类似摇杆,那得专门改一个遥控器好一些,因为要和joystick那边配合。
我控制的都是电机、舵机还有一个灯,都能通过设置直接在地面站软件控制吗?
是的没问题

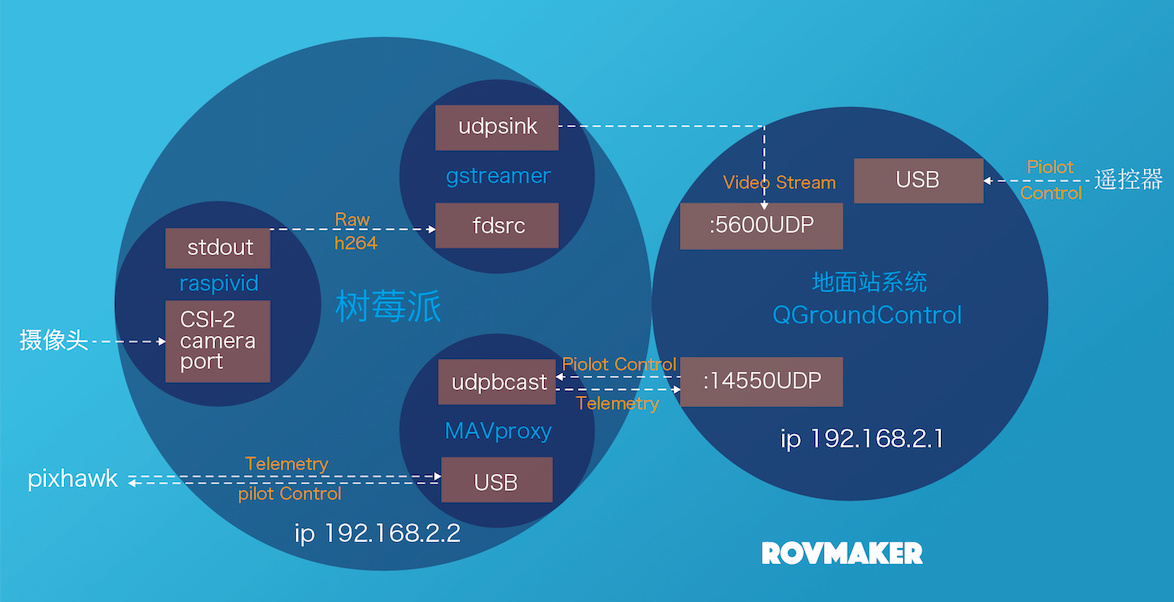
是的,树莓派运行的ardusub没有用户界面。
不过里面有一个网页页面可以用来查看和更改树莓派的状态。
连接好树莓派之后,登陆 http://192.168.2.2:2770

可以修改摄像头参数和wifi,在线升级等。
新版本镜像文件中树莓派的用户名密码更改:
user: pi
password: companion
ardusub系统简图:
3 个赞
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
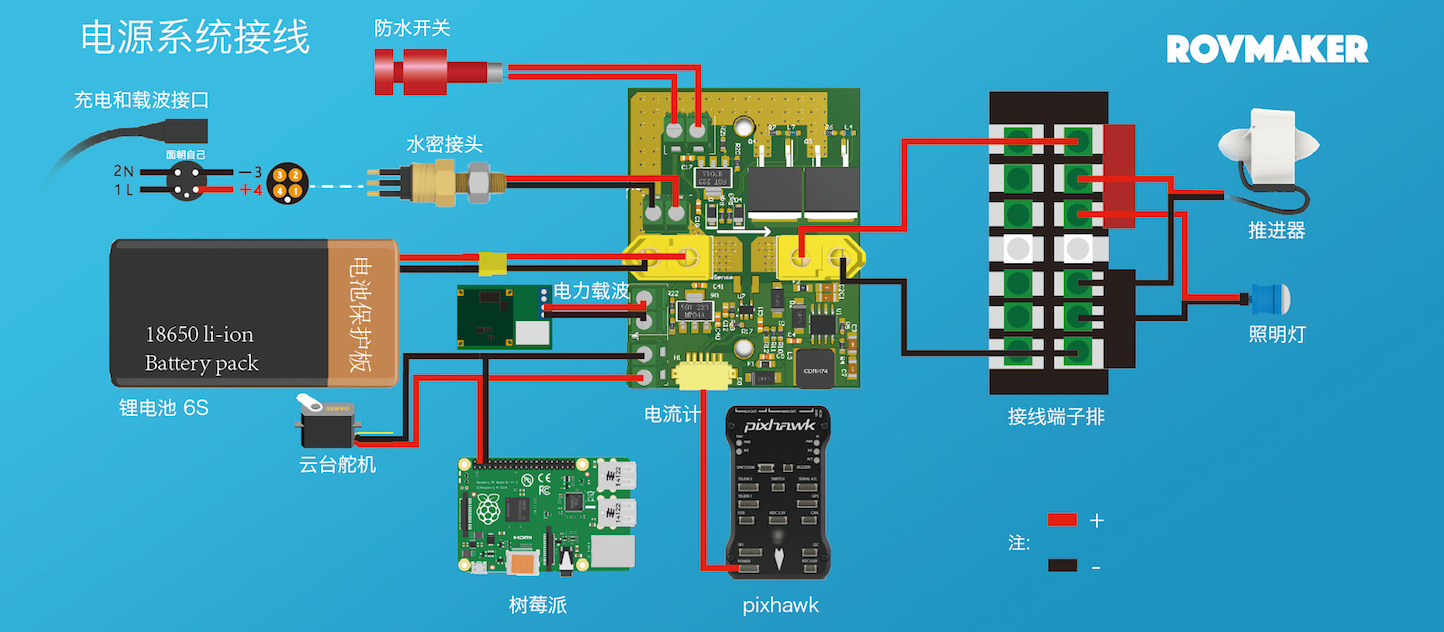
请问系统供电可以通过电流计直接连接到pix,从通道分配给电机,舵机嘛