在下刚刚接触ArduSub,以前玩过Pixhawk无人机飞控。 我想问下, ArduSub水下机器人 为了保持姿态 ,需要控制电机正反转吗? 使用双向电调吗?
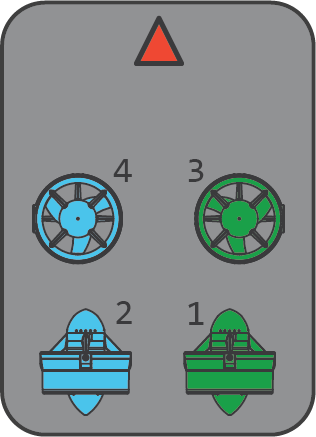
比如 这个4推进器的模式, 如何保持俯仰姿态?
是的,电机需要正反转,需要双向电调。
不同的框架布局能实现的稳定效果不一样,你这个图片上的属于简易布局,稳定性能不是很好。
在下刚刚接触ArduSub,以前玩过Pixhawk无人机飞控。 我想问下, ArduSub水下机器人 为了保持姿态 ,需要控制电机正反转吗? 使用双向电调吗?
比如 这个4推进器的模式, 如何保持俯仰姿态?
是的,电机需要正反转,需要双向电调。
不同的框架布局能实现的稳定效果不一样,你这个图片上的属于简易布局,稳定性能不是很好。