
em…这种传统布局以外的需要做自定义布局的,需要自行修改编译ardusub固件的。
ardusub本身包含一个六自由度的推进器库,推进器库文件对每一种布局预设都建立在推进器上层定义,类型如下:
AP_Motors
|---- AP_MotorsMulticopter
|---- AP_MotorsMatrix
|---- AP_Motors6DOF
增加一个新的推进器布局预设需要添加自定义的推进器配置到 [AP_Motors6DOF.cpp]。找到以下代码行,添加你的自定义框架配置。框架配置会从FRAME_CONFIG载入参数引导, 你只需要更改这些参数到CUSTOM来定义自己的布局配置。
case AS_MOTORS_CUSTOM_FRAME: // Put your custom motor setup here
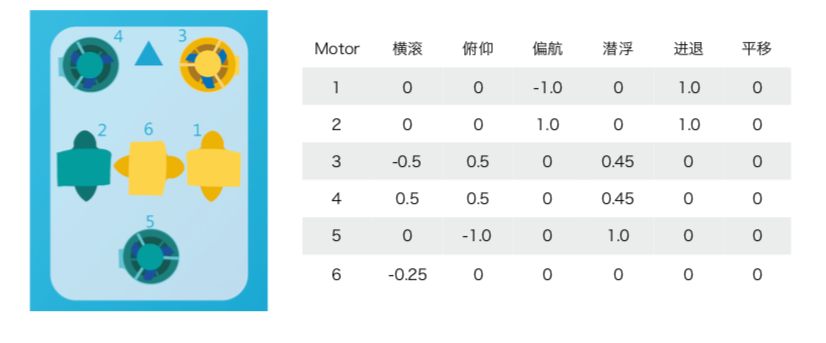
定义的原则即该推进器在六个自由度上的推力分配(可以理解为在每个轴上的分力贡献),这些定义可以在AP_Motors6DOF.cpp中查看。 以预设的框架配置文件作为参考会更加容易理解。以下是框架配置参数示例(均在机器坐标系下):