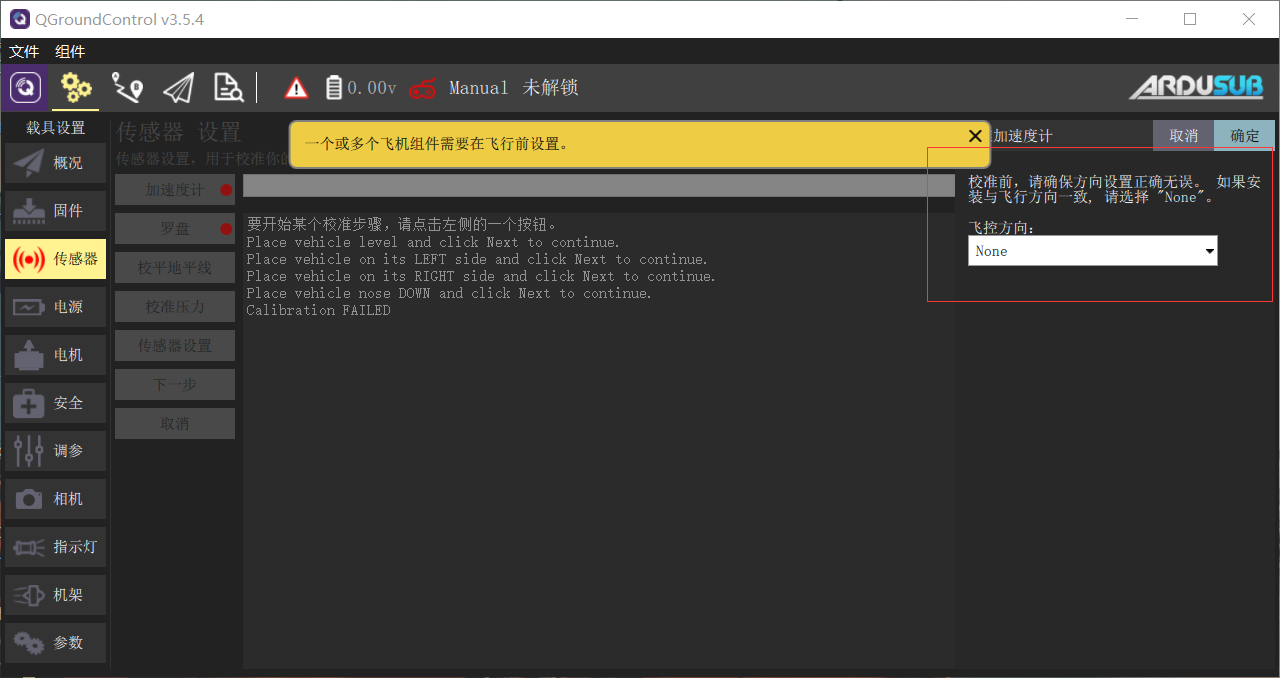
看一下校准时候最右边的一个选项,需要选择起飞状态的初试角度。这个角度要看你pix在设备里面是怎么摆放的。
我没有选角度哦
默认是多少?
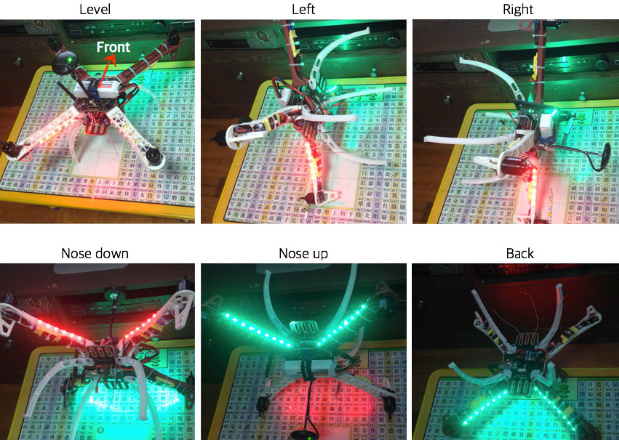
参考这张图,可能是你摆放的不对。
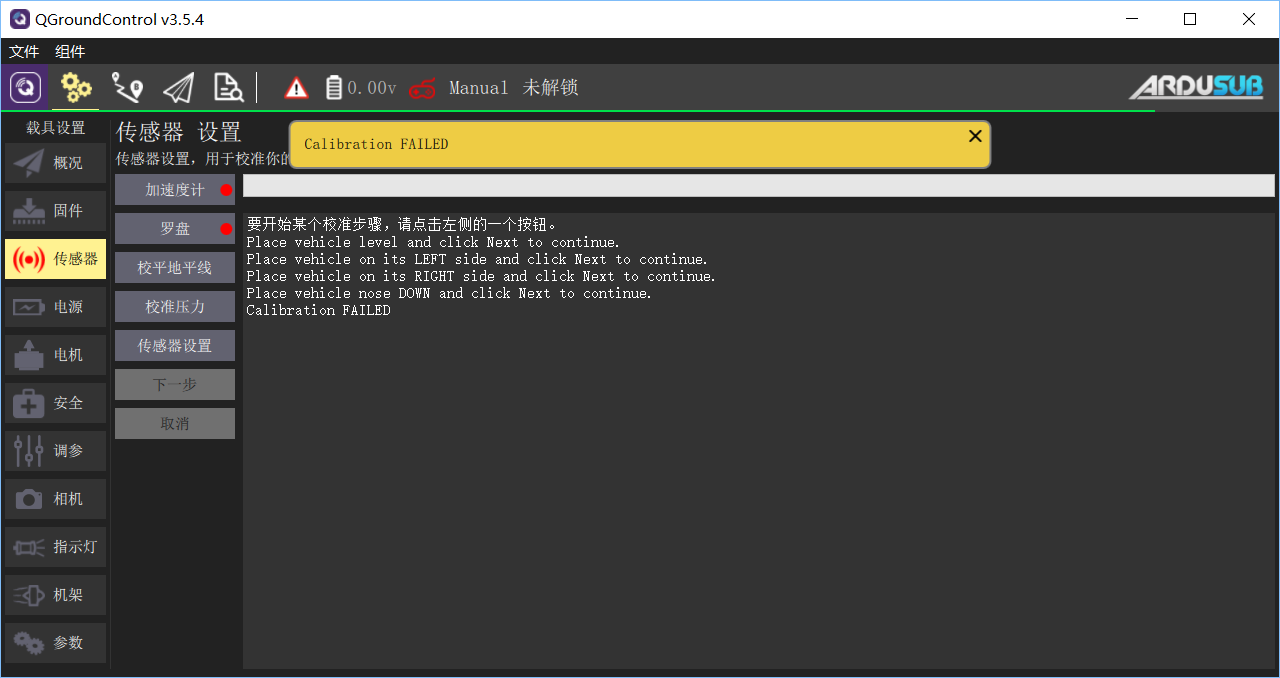
我用在水下机器人上,我都还没有把飞控放在机器人本体上,只是做加速度计的校准,Down肯定是这样的塞箭头向下,向上我也试了,这个会不会是硬件的问题呢?
也不排除硬件问题,也有一种可能是你在建筑物内钢筋混凝土磁场干扰罗盘。 我们办公室有就一个钢筋结构比较多的角落无论如何都没法校准成功。