今年6月份刚毕业,由于自己研究的课题是水下机器人,在学校期间已经对控制系统、通信以及上位机做了部分设计,目前软硬件还不是很完善,但是整个已经有了大概的框架。所以决定从零制作一台水下机器人ROV,把过程记录下来,大家一起来学习和交流。ROV主控采用STM32,上位机有两个方案,一个是PC端上位机(ROVClient.exe)一个是安卓版上位机(ROVClient.apk),关于系统这里就不过多介绍了,后面会详细说明。
4 个赞
目前在上班,所以帖子更新过程会有点慢,希望感兴趣的同学可以关注一下,一起交流。
4 个赞
暂时有些东西在家里,所以更新可能会有点杂乱无章,望大家能够见谅。
1 个赞
密封舱是在店里够买的,直径100mm铝合金版本,本来edge版本有两个密封舱,电池舱和控制系统舱,我为了只用一个舱,决定把电池和控制系统全部装进舱里,所以对空间利用要求较高。首先对电池部分进行设计,上图
1 个赞

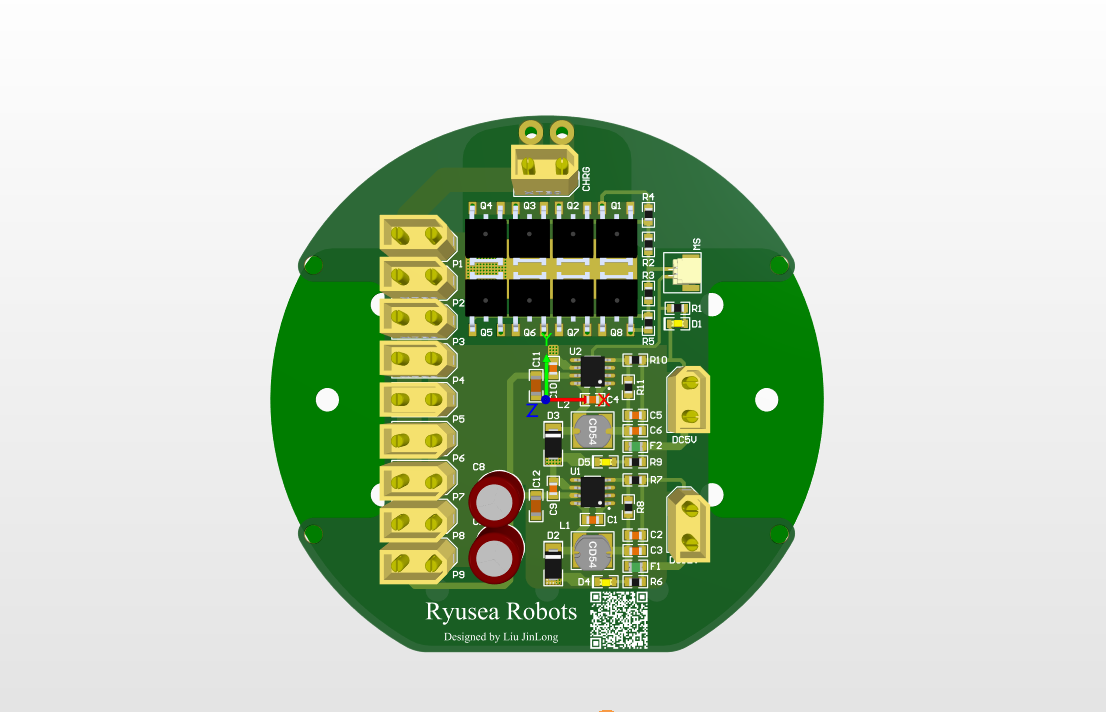
电池采用16节3400ma松下锂电池,总电压16.8V,容量13.6AH,并且集成电源开关板,9路20A输出,最大电流160A,并各有一路5V和12V稳压输出,给外部设备供电。电池尺寸直径93mm,长度80mm,通过铜柱安装在法兰上。等有时间了再放实物照片,现在手里只有3D渲染图了。
不要PIX与PI了?
同搞水下机器人的,方便加下学长qq交流下吗?qq:873128255




You can contact us by scanning this QR code.

下面有联系方式
1 个赞
不错,点个赞:clap: 有需要水下定位的可以联系我。
楼主,你这个电池组是自己搞的么?
我们公司近期要定制一台简单的ROV,有兴趣的可以联系 15151404564
什么定位方式