由于pix并没有印刷文字标示通道,经常会有顺序的困惑,下面解释一下:
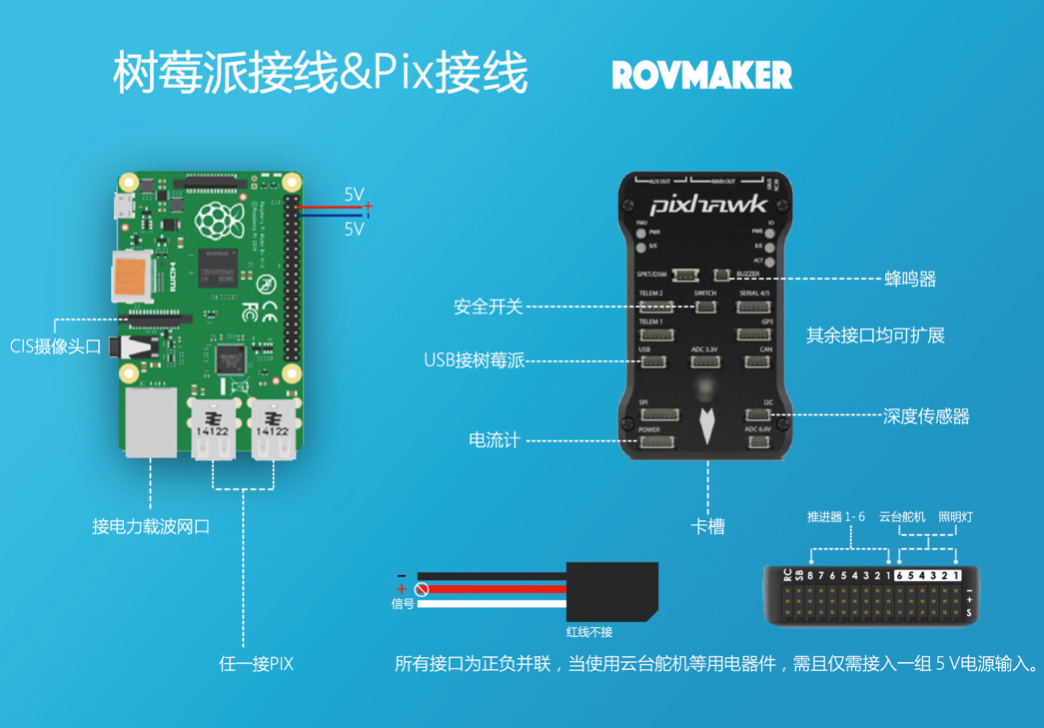
接线图如下,在连接电源之前一定要检查好接线防止短路。每个推进器有红黑黄三芯线,红黑为电源,黄色为信号线。在接线时,所有推进器和灯光的红线和黑线分别并连到一起,然后使用接线端子片接到接线排的正负两端,另外所有推进器和照明灯的黑色负极(和电源的负极共用单独引出,红线不需要)与黄色信号线都需要对应地通过pix的连接线接到pix图示口(注意是黑色黄色2芯接上,没有红线)。
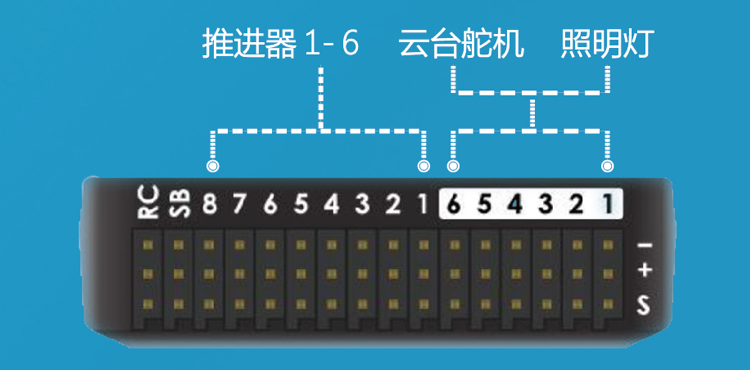
云台舵机也是红黄黑三根线,但是舵机的电源需要单独连接。如果是继电器版本,从接线排引出正负通过电源模块转换为5v,将5v连接到pix,舵机直接插入pix,此时舵机已经单独供电。如果不是继电器版本,从电源管理的pcb上引出5v接到pix,不需要电源转换模块。如图,pix的侧面接口依次为:主要Main的 (RC SB) 和 8-1,扩展Aux的6-1。其中Main 8-1依次代表Channel8-Channel1,为推进器接口,Aux 6-1依次为Channel14-Channel9。请在后面的软件配置中注意此顺序编号选择所使用的输出Channel口。
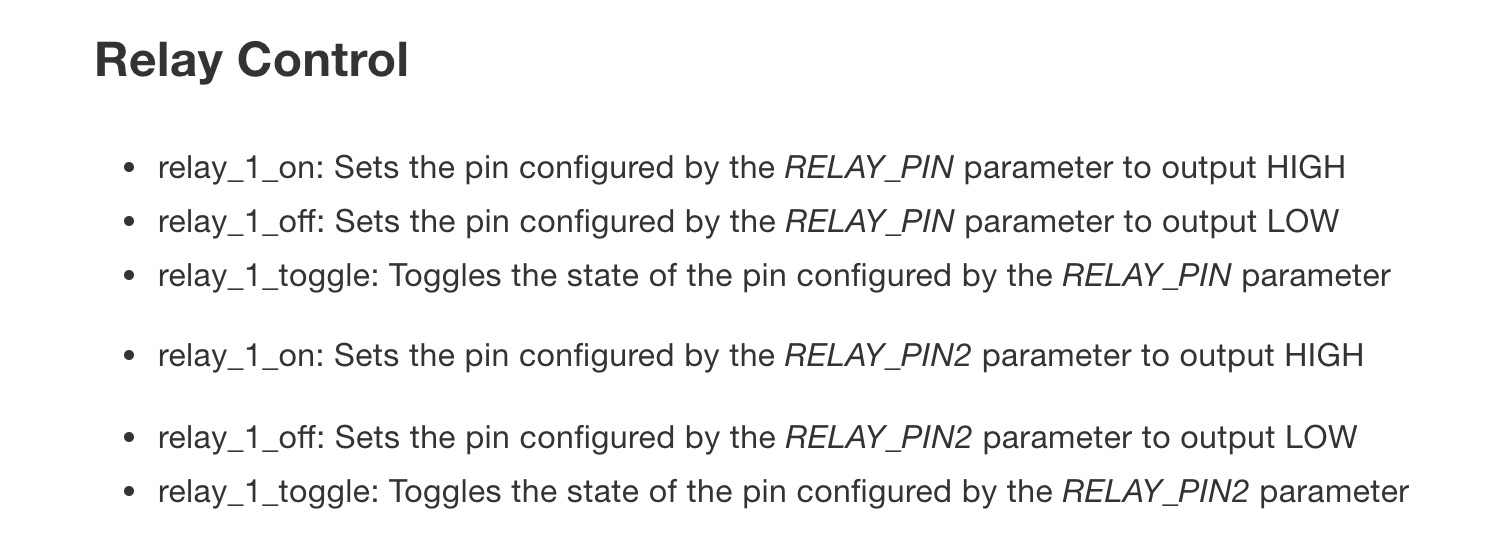
怎么知道relay-on1和relay-off1对应的是哪一个PWM接口呢?
在parameter里搜索relay,会看到4个关于relay通道的设置。
分别是RELAY_PIN,RELAY_PIN2,RELAY_PIN3,RELAY_PIN4。
disable处下拉可以看到:Pixhawk AUXOUT1-6等不同飞控的relay输出口,设置一下就搞定了。
1 个赞
默认的初始配置中下,aux的5和6(SERVO13 和SERVO14) 是relays开关量,不会输出pwm信号,需要在parameter中的BRD_PWM_COUNT参数中更改,这个参数定义了输出通道中包含多少个pwm输出,默认是4个。
其他的你需要分辨清楚pix输出口的标号和rc输出入口的标号再进行relaypin的设置。
1 个赞
pix的输出main和aux的通道定义:
| Pixhawk Label |
Servo Channel |
| Main 1 |
1 |
| Main 2 |
2 |
| Main 3 |
3 |
| Main 4 |
4 |
| Main 5 |
5 |
| Main 6 |
6 |
| Main 7 |
7 |
| Main 8 |
8 |
| Aux 1 |
9 |
| Aux 2 |
10 |
| Aux 3 |
11 |
| Aux 4 |
12 |
| Aux 5 |
13 |
| Aux 6 |
14 |
aux可以改为gpio输出,在parameter的BRD_PWM_COUNT中修改,默认是4:
数值设置为4时,aux的5和6为gpio,aux的1—4为pwm。
| 值 |
aux1 |
aux2 |
aux3 |
aux4 |
aux5 |
aux6 |
| 0 |
GPIO |
GPIO |
GPIO |
GPIO |
GPIO |
GPIO |
| 2 |
PWM |
PWM |
GPIO |
GPIO |
GPIO |
GPIO |
| (default) 4 |
PWM |
PWM |
PWM |
PWM |
GPIO |
GPIO |
| 6 |
PWM |
PWM |
PWM |
PWM |
PWM |
PWM |
控制舵机或者机械手:
aux输出必须通过BRD_PWM_COUNT参数配置至少有一个PWM,以操作一个舵机。
在mavlink中,可以通过命令DO_SET_SERVO操作。
此命令可用于设置任何未配置为电机输出的舵机通道的输出。这个命令可能与其他在舵机通道上操作的功能相冲突,例如舵机云台或灯光。为了避免冲突,应该将相应的SERVOn_FUNCTION参数设置为禁用(0)。
3个舵机也可以通过操纵杆按钮操作,*_servo_n的操纵杆按钮函数将控制Aux n引脚上的输出(这些不能像继电器输出那样重新映射)。
| Joystick button function |
Aux channel operated |
| servo_1 |
Aux 1 |
| servo_2 |
Aux 2 |
| servo_3 |
Aux 3 |
高低电平输出:
ardusub支持控制4个输出口为高低电平输出。需要通过BRD_PWM_COUNT参数将输出配置为GPIO,需要为相应的RELAY_PIN参数选择输出引脚。在mavlink中可以通过命令DO_SET_RELAY操作。
最多可通过操纵杆按钮功能操作三个继电器。
3 个赞
PWM输出类型的修改方法:
在parameter 中的MOT_PWM_TYPE可以修改输出类型。
有4种可选(根据你的电调输入信号的要求选择):
| Value |
Meaning |
| 0 |
Normal |
| 1 |
OneShot |
| 2 |
OneShot125 |
| 3 |
Brushed |
PWM范围修改方法:
在parameter中的MOT_PWM_MIN和MOT_PWM_MAX可以修改输出范围。
MOT_PWM_MAX:范围0-2000可选
MOT_PWM_MIN:范围0-2000可选
设置为0代表使用RC3_MIN和RC3_MAX定义的数值。
云台舵机倾斜角度设置:
在MOT_YAW_SV_ANGLE:中设置,范围0 2,细分0.1,单位:角度。
3 个赞
仔细的阅读过所有的回复,但是作为初学者太多的参数让我不知所措。我也将所有回复中有用的参数都进行了设置,但是还是不能有效的控制舵机。希望周总百忙之中抽出时间,可以列出比较明确的参数设置步骤,傻瓜式教学,最后实现两个按键控制舵机的转动。
xxtroy
10
关于pwm输出频率:
pwm输出频率在parameter中从RC_SPEED 更改,MAIN主通道默认200Hz,Aux扩展通道默认 50 Hz,注意有些舵机无法承受50-100 Hz会导致损坏。
alu
13
我想加入直流有刷电机的控制,接线为aux的-和s接电调的地和pwm,电调的gpio接aux5的s,这样可以吗?
alu
14
请问参数列表里的RC和SERVO分别指的是什么?
为啥飞控的3.3v不能驱动我的直流有刷电调?同样的3.3v,电源模块可以驱动
xxtroy
15
rc是遥控器,servo是舵机
不要用pix的电源驱动附载,单独供电共地。
1 个赞
bubble
18
你好,我电调的PWM范围是1100~1940us,我应该改RC还是Servo
请问为什么在MOT下面没有找到YAW_sv_angle的设置选项呀?
11163
21
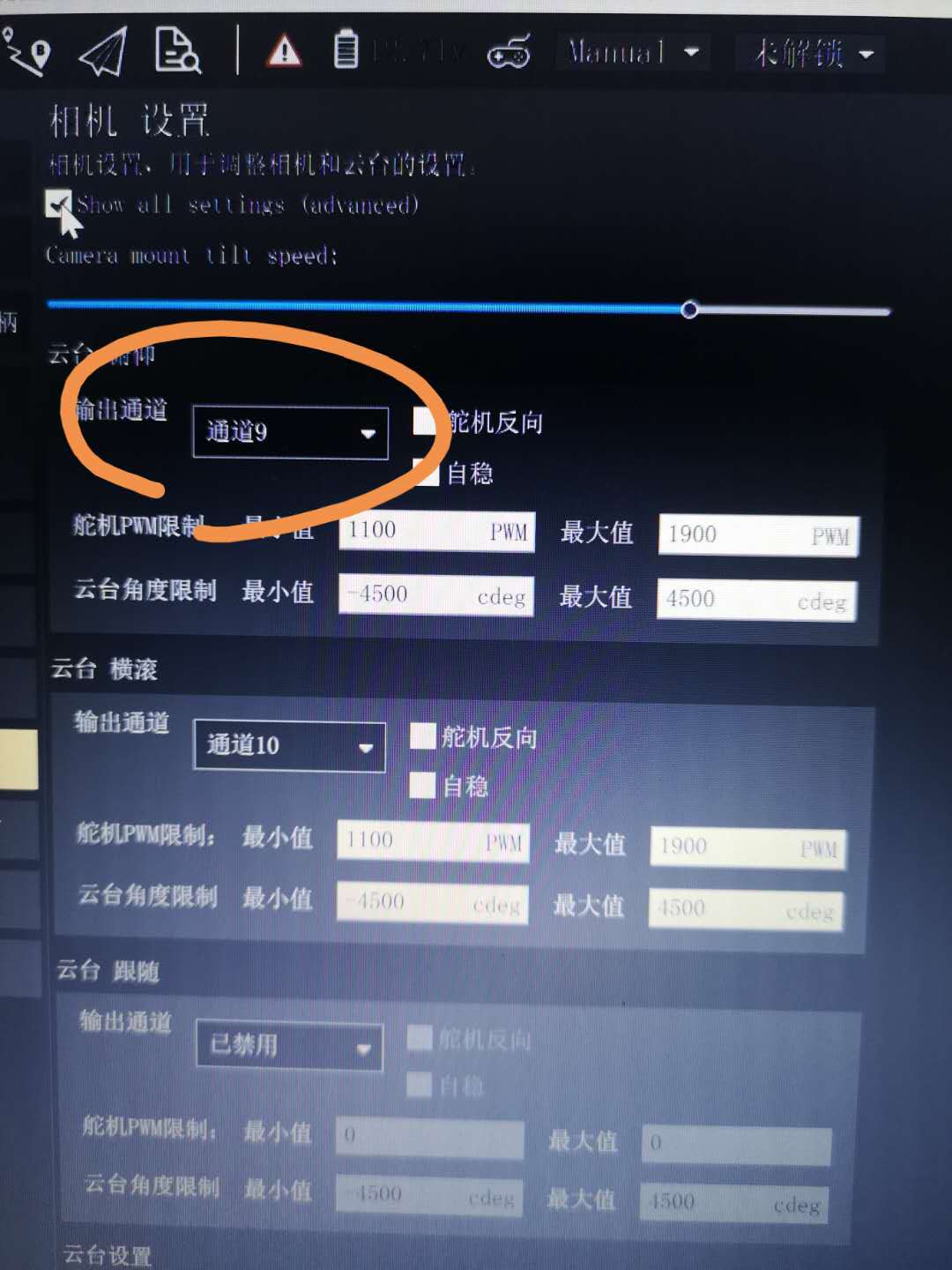
关于舵机的控制我也纠结了一阵子,今天终于搞定了一部分(只能控制一个舵机),其实没这么复杂,大家看看我的设置。
舵机用相机云台设置,接PIX第9通道。

用X-BOS第9和10按键对应控制舵机开合,
QGC中的手柄设置里,对应第9和第10通道分别设置tilt-ip,tilt-down(对应舵机的动作是开或者合)
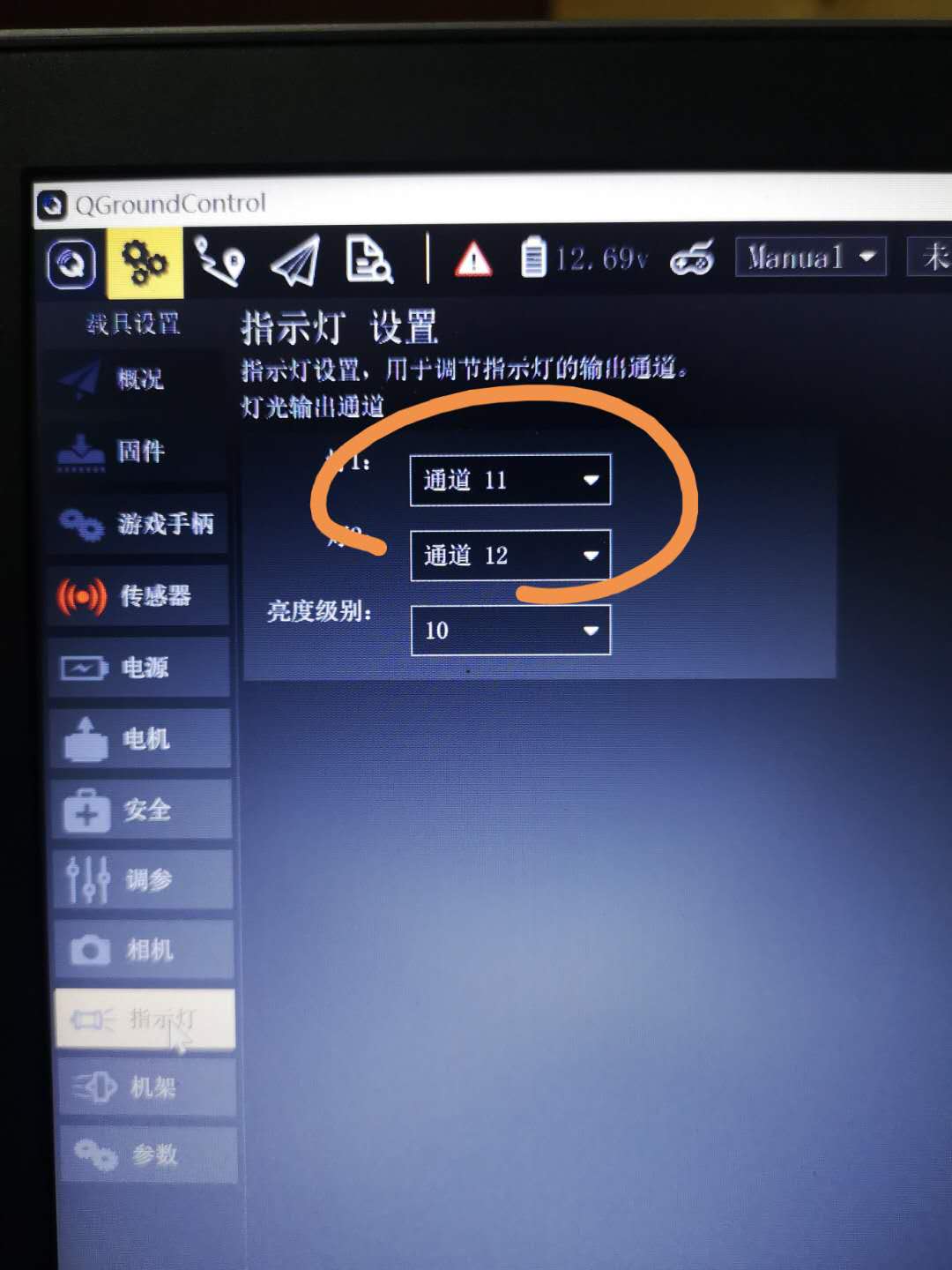
灯光这么设置,PIX接11通道,
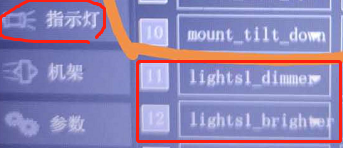
灯光在QGC里参数这么设置。
手柄可以控制灯的开关还有明暗调节。

 用X-BOS第9和10按键对应控制舵机开合,
用X-BOS第9和10按键对应控制舵机开合,
 灯光在QGC里参数这么设置。
灯光在QGC里参数这么设置。
