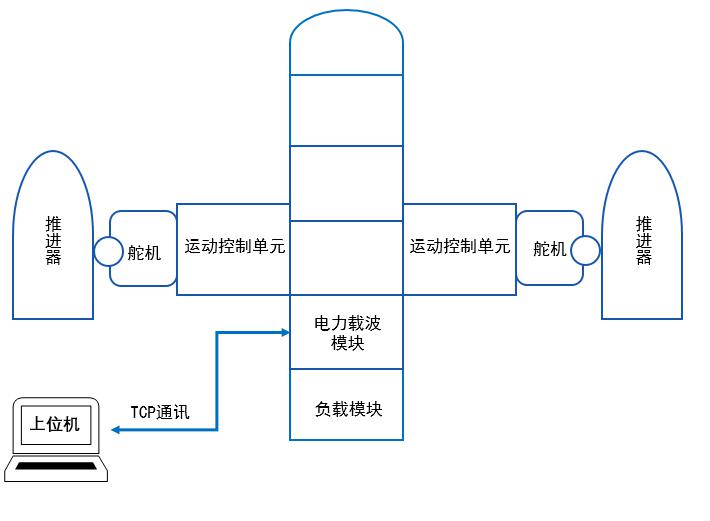
大家好,我们现在打算做第二款水下机器人,把推进器装在舵机上,通过控制舵机来改变推进器的姿态,用pixhawk+qgc来做,我是想用四个舵机控制两个推进器的姿态,用pixhawk 输出pwm来控制舵机,应该怎么实现?
你好,我想请教下,你这个舵机是如何固定安装在你的水下机器人上面的?可以参考一下吗?我们现在也想将我们的摄像头和声纳装在舵机上,但是不知道怎么固定安装