之前想的太简单了 下水以后问题不断 最后一次下了大约有10米吧 进水废了:cry:

遇到一些什么样的问题呢?整个系统是怎样的?![]()
向前行驶不水平 头向下 垂直下潜不好用 下潜机身就旋转 事先想的太简单了 好吧 我的外形是仿照Trident的 虽然十分不像:dizzy_face: 系统??? 我不是太明白 ![]()
用了pix和ArduSub?还是自己做的主控?
结构问题都好解决,控制系统上不知道你用的是什么芯片,有没有写入稳定算法?
没有任何芯片 连陀螺仪都没有:sweat:
结构设计重心有问题,打转估计是两个尾部电机推动有速度差,最好测试一下看看电机转速是不是差异较大?动手精神值得赞赏:)
我的机器问题是下潜打转 像飞机那样:joy: 幸好围观的人大多不懂 潜水器像一只小猪一样笨拙 不过显示器出现海底的画面的时候真心激动 ![]()
可惜,但是鼓励!建议在舱内放置几个漏水传感器(就是两根裸线加个电阻),然后再程序里加入一个线程监测传感器的状态,一旦漏水,立即断电。
下次在做一个潜水器得考虑漏水传感器了, 不过真的漏水了电子元件也是凶多吉少 ,海水腐蚀性太厉害了 我现在看到海水就如硫酸似的 有阴影了:joy:
漏水不至于一下子全进水。我上周测试的时候气压泵进水了,一点也没有影响,我是回到家才发现的。
把电子元件二次密封能更保险一些
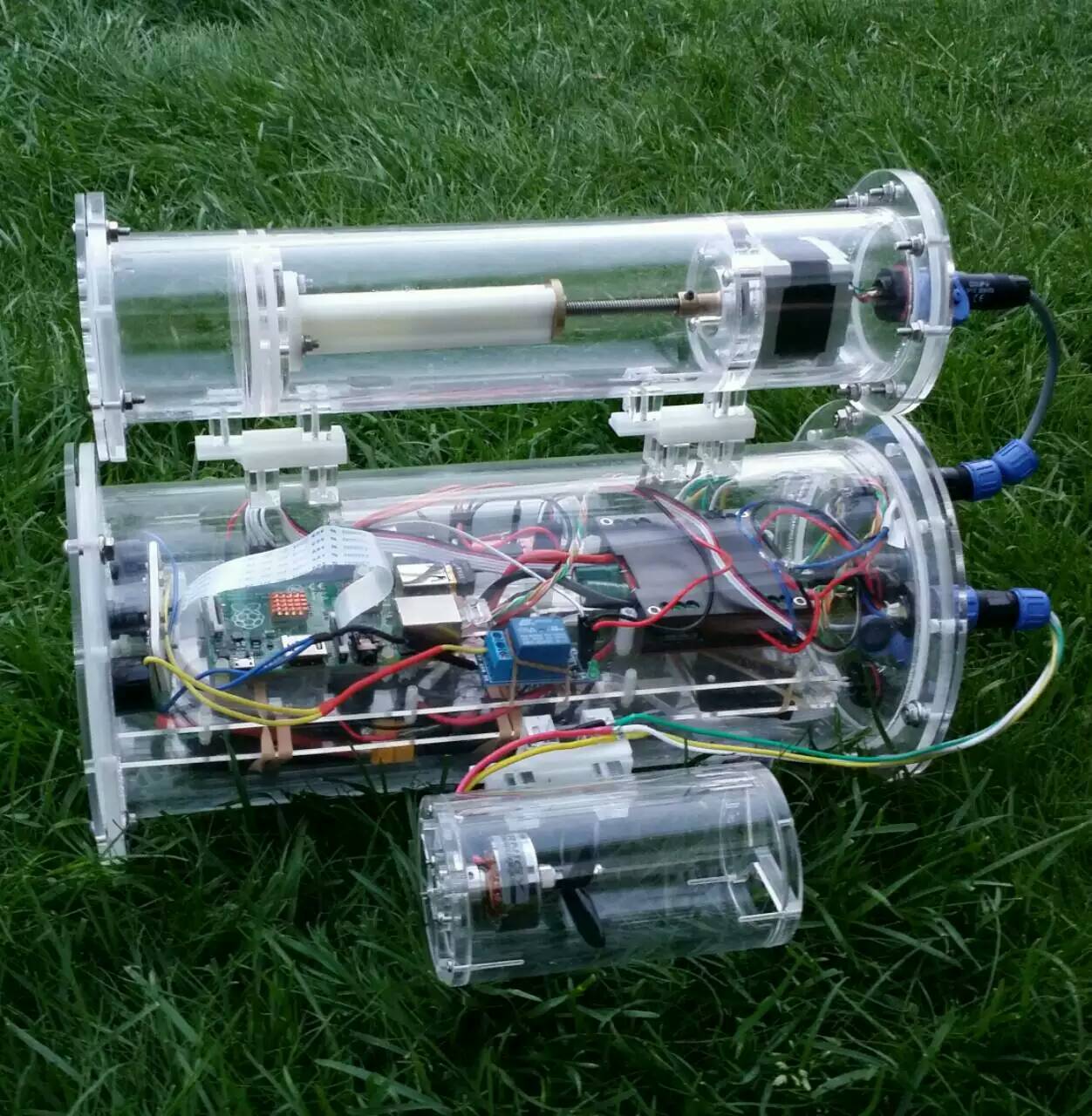
上图给我们看看你做的rov啊
漂亮啊,哈哈哈,看起来是用42步进电机调整浮态的,亚克力轴向密封,还有防水接头。很简洁啊,赞一个。
1.这些材料在你那边方便买吗?自己动手加工的吗?
2.是用树莓派做的控制板吧?树莓派和电调直连的吗?中间有没有加个Arduino过渡一下?
3.是在树莓派上搭建的服务器吗?
4.图像采集是用的mjpg-streamer插件吗?树莓派摄像头效果怎么样?清晰度、分辨率和感光度
5.界面是用什么写的?JavaScript吗?
6.有装数据库什么的来个存储数据和图像吗?系统稳定吗?延时大不大?
7.供电方式?
哈哈,很好奇。
都让你说中了!知音啊,呵呵。
哈哈,你有微信吗,我觉得有必要保持联系。
如果在下面也装一个步进电机配上一个配重块 能实现潜水器的俯仰姿态吧:grin:
是的,但没什么用。俯仰的目的是视角,而视角的控制应当用云台,两个小舵机就行了。关键是这个方式的时滞较长。
刚才测了一下时滞,大部分在0.12到0.3秒之间,平均为0.23秒。满足需要。
好棒,独立完成了这么多工作。
感觉电机(防锈)和密封舱(机加工法兰)可以有很大的改进。![]()