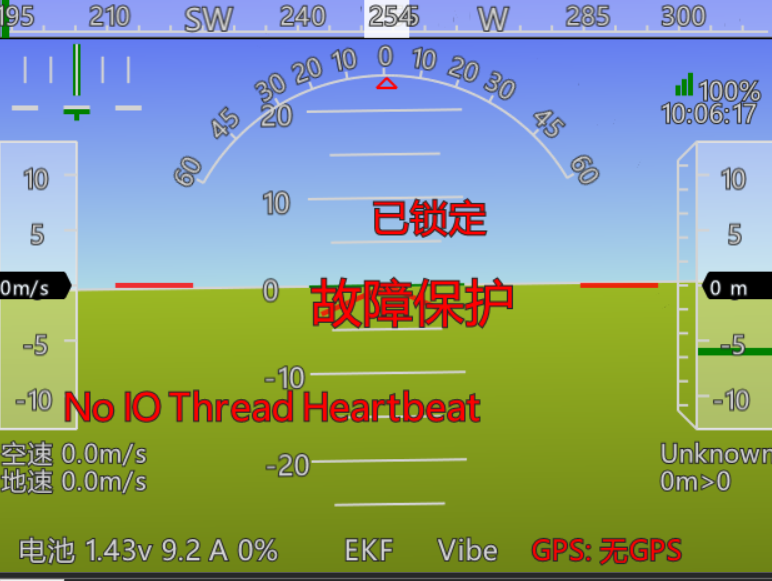
我购买的舵机,昨天测试发现,再不控制情况下自己转,不受控制。今天测试时通电后,舵机不转了。昨天测试确认信号线和负极是共地的,但今天连接发现不共地了。地面站显示参数如图。
舵机连接到辅助通道3通道,即servo11。
地面站配置:RC_SPEED为50HZ,因为要自动控制俯仰,设置MNT_STAB_TITL为1,MNT_RC_IN_TILT是11.
接线:电源模块给舵机供电。舵机负极连接pixhawk辅助通道3,pixhawk连接电脑,电脑连接电源,电源给电源模块供电。这样行吗?昨天用此接法是共地的,今天发现是不共地的,是因为接线的问题吗?
信号线和负极共地? 舵机的地线要和PIXHAWK的GND共地。是否可以确定下PIX的输出信号是否是50HZ? 这边信号确认之后再连接舵机测试。
舵机的信号线连接到PIX的PWM输出通道。 不是舵机的负极连接PIX的PWM输出通道。

舵机在无信号的情况下上电 和 信号频率过高会导致舵机不受控制的抖动。可以先确定下PIX那边输出的信号吗? 接线这样是没问题的。 给舵机供电的电源模块是多少V输出的 电流可以提供多少?
频率设置了50HZ,舵机供电是24V,电流可提供5A。
可以测量下输出的信号吗? 这样可以排除PIX这边设置的问题
没有测试PWM输出设备,测得信号线与负极的输出电压,水平状态下稳定输出0.249V,pixhawk前面上抬电压变大,10度左右0.257V;后面后面上台电压变小,10度左右0.238V
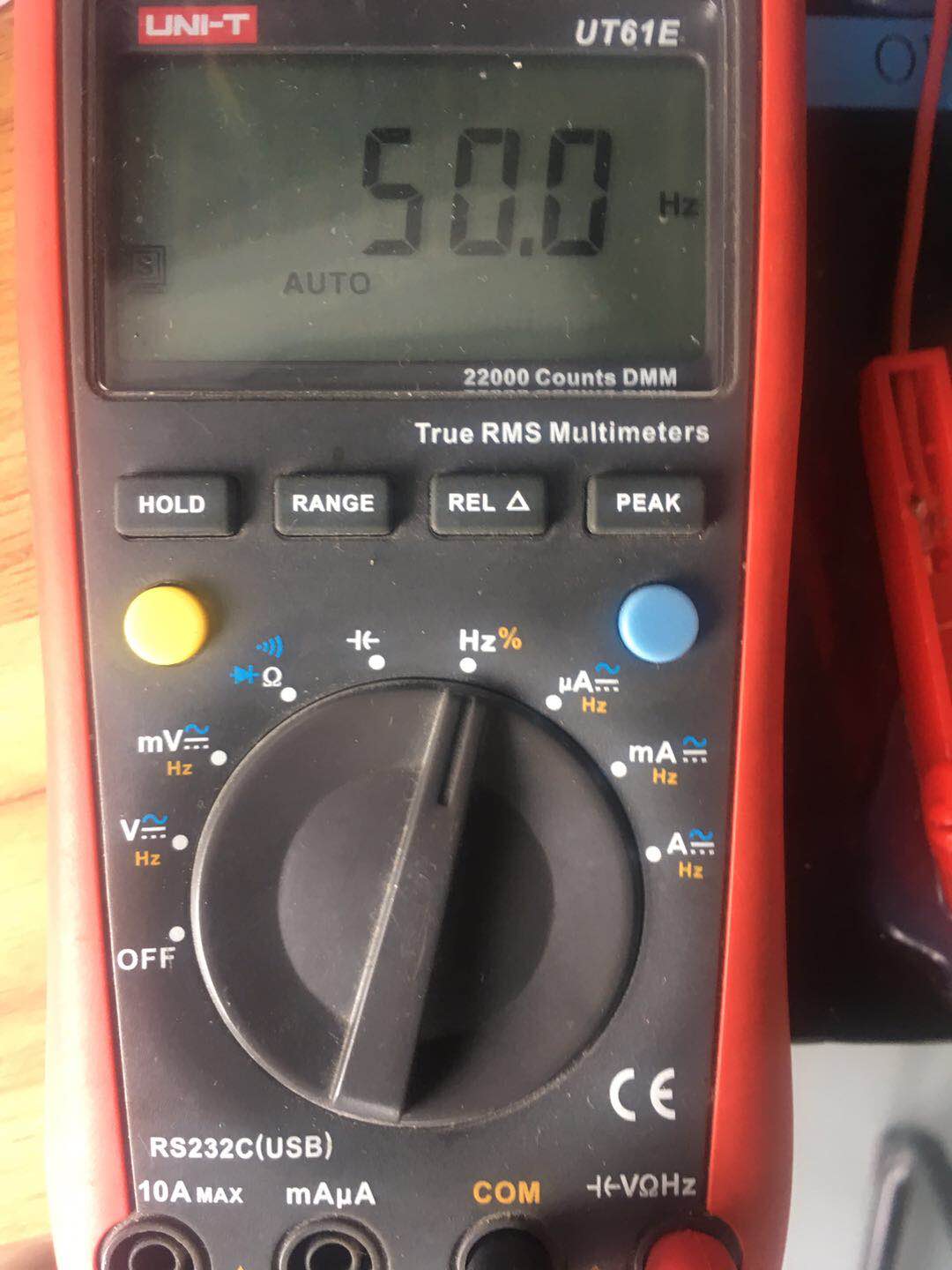
看到了,测试输出50HZ
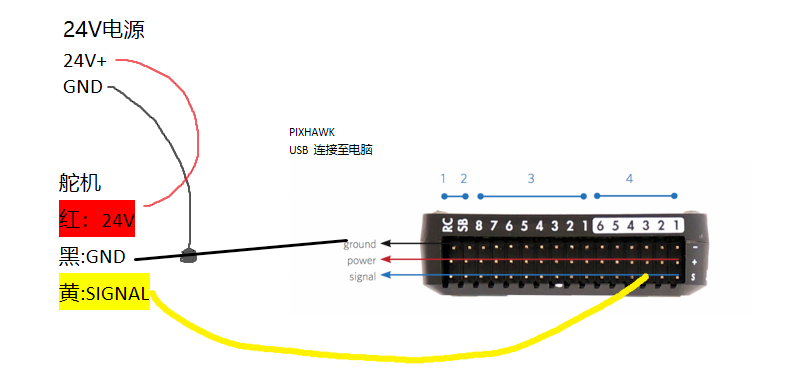
现象:舵机和图片接线一样,结果舵机不转动。
配置:pixhawk输出频率为50HZ,接的是辅助通道3。
连接到mission planner后提示报错:No IO Thread Heartbeat,我感觉和这个有关。
现象:想要调整相机云台时,发现界面全灰,无法设置,我用的是ardusub3.5的固件。
不解的是,昨天接线舵机在不受控制地无规律转动,但是今天无论怎么接线,舵机都不转。
接线顺序按照图上顺序来的,用直流电源24V供电,最大电流5A。
pixhawk中可以对舵机进行角度限制吗?
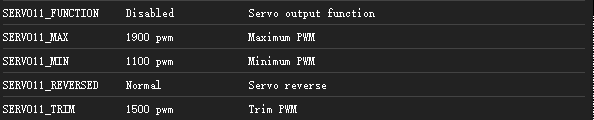 可调节SERVO_MAX SERVO_MIN 调节PIX输出PWM的高电平持续时间
可调节SERVO_MAX SERVO_MIN 调节PIX输出PWM的高电平持续时间
你好 有missionplanner和pix做rov的教程吗 可以交流一下吗
好的谢谢
啊