手上有一块解算板和传感器,ROV用的是树莓派加pixhawk飞控,请问连接的时候如何连接,深传接谁,解算板怎么接,是把解算板连接飞控,还是解算板连接树莓,我用的地面站是QGC,如何在QGC里读到深传的数据,另外我看网上介绍加了解算板以后可以生成曲线什么的,那个要怎么实现呢?
1 个赞
深度传感器可以直接连接PIXHAWK。PIX可以直接读取深度传感器的信息。 、
解算板的功能是IIC读取深度传感器转成串口输出。你的这个应用里直接用PIX读取。
那通过QGC的哪个界面得到数据呢?
深度传感器连接至PIX的IIC口后,PIX里会有校准传感器的选项。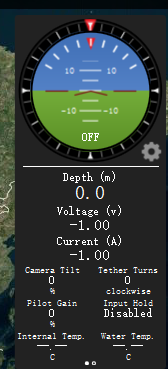
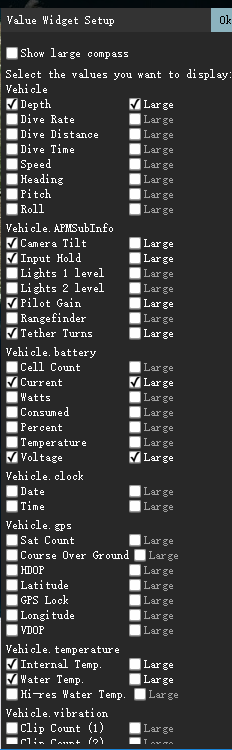
可以在这个界面上选择显示深度数据。
深传是不是也可以读取温度数据和压强数据,这个可以从哪个界面看到呢?
非常感谢啦
我没有这个齿轮选项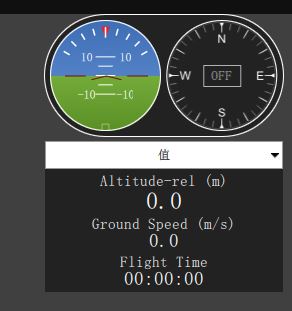
这个可能是QGC版本的问题 ,建议更新至新版本使用。
请问可以给个链接吗