水下机器人设计快速指南 HOW TO MAKE ROV
不完全指南,建议入门爱好者阅读。

在做一台水下机器人之前先整体想象一下成品效果。
以下是几个常规的推进器布局,推进器布置主要探讨两个问题:
推进器的数量
推进器的位置
这两者决定了ROV的可能运动和运动性能。
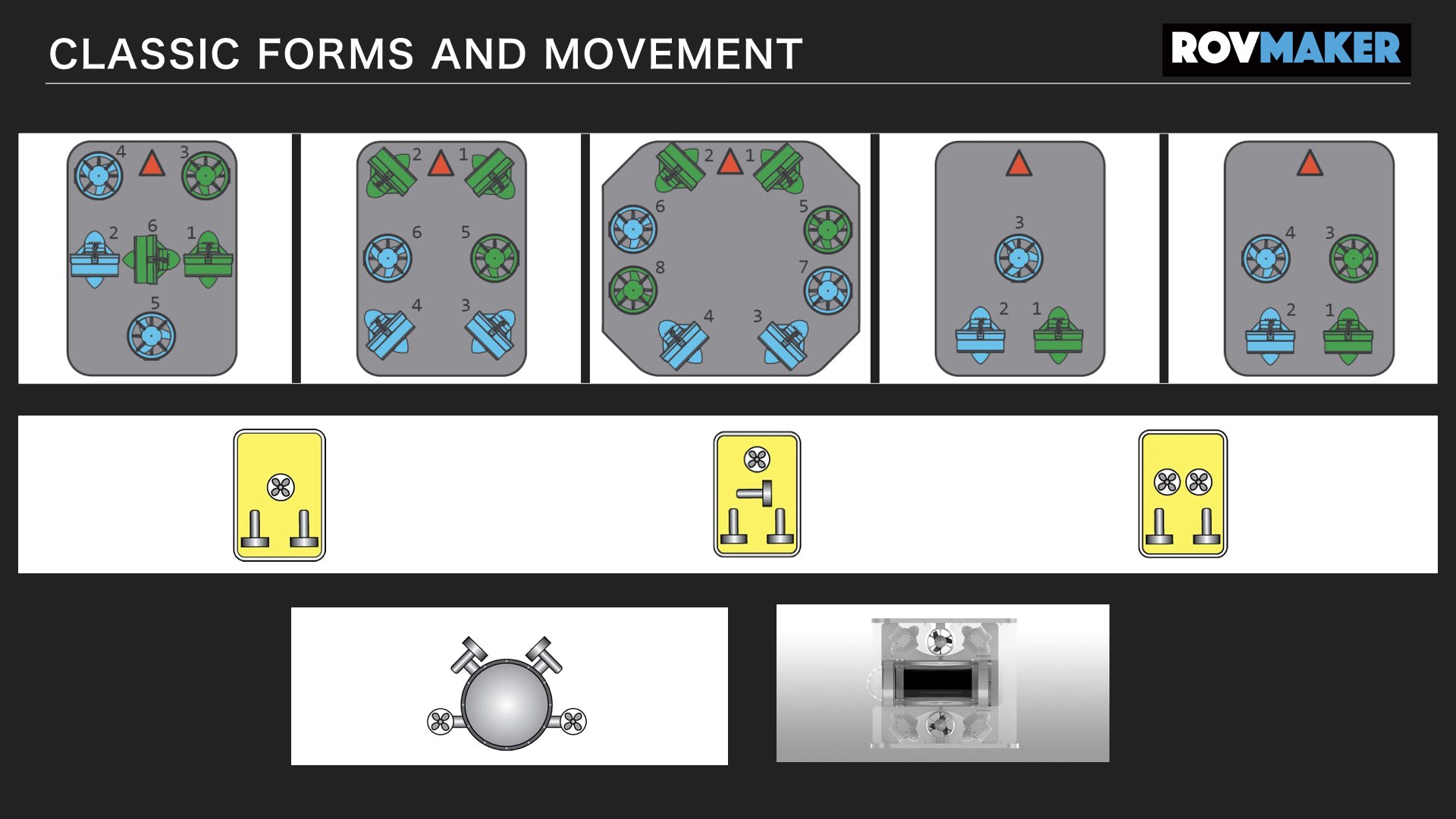
以下分享一些自己的思考和经验,原则上, 不具有矢量推进的ROV至少需要三个自由度—进退/转向/潜浮。四个推进器,在三个推进器的基础上增加了横滚,也提升了上浮下潜的动力。四个推进器另一种布置实现了侧移,能够完成定点的转向,也就是在不前进后退的同时完成转向,一方面也更佳能抵抗水流。
更多的推进器意味着更自由的操控和抵御水流的能力。
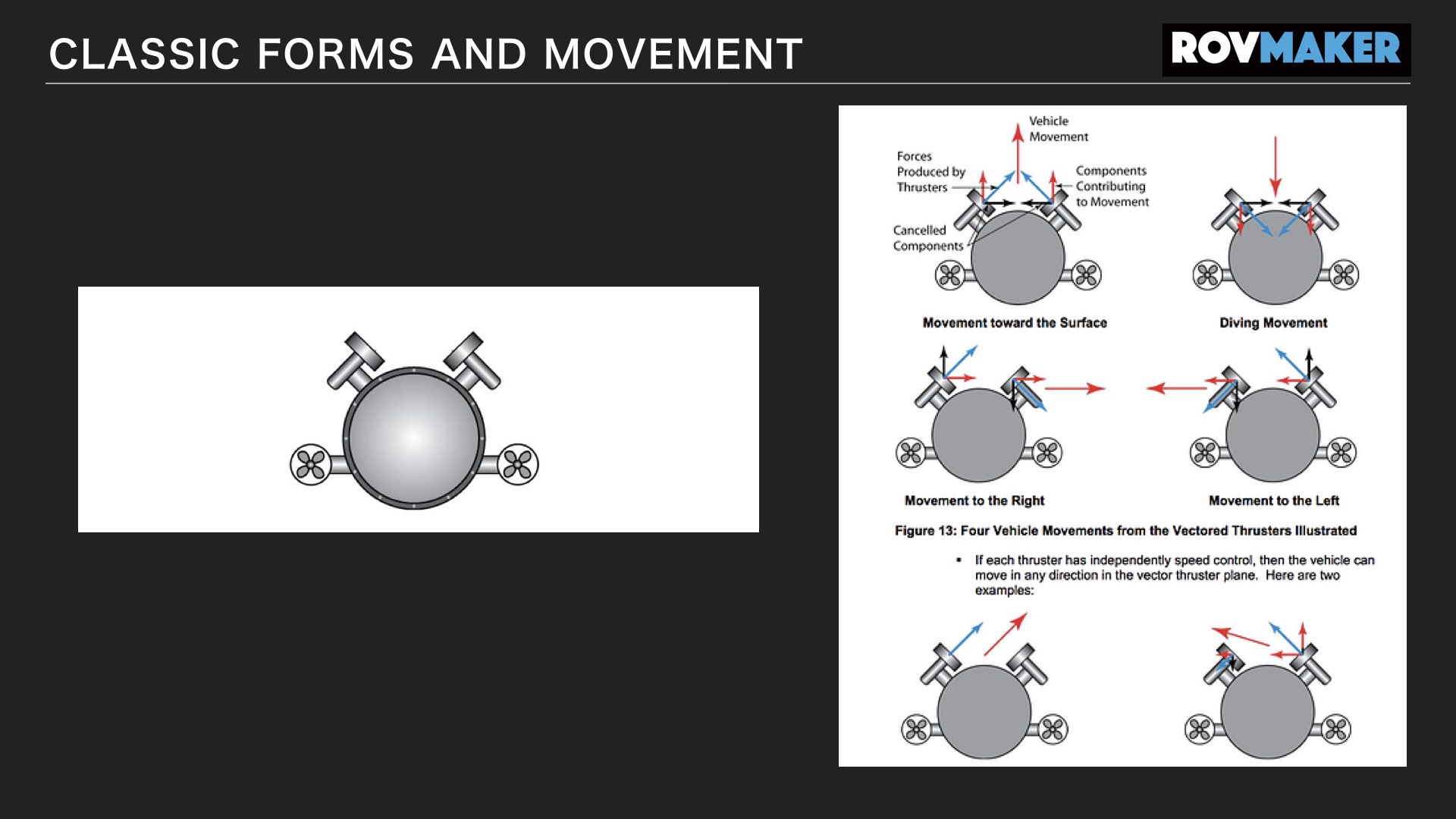
这是交叉布置推进器的运动方式,在带有机械手的rov上有更好的抓取性能,因为倾斜的两个推进器更加能保证机械手的指向稳定。刚才说到最少需要三个动力,完成进退和转向至少需要两个,潜浮至少一个,所以第一款测试机型sail使用了三个电机的配置,是与openrov trident相同的动力配置,他的操作更像是固定翼飞机。
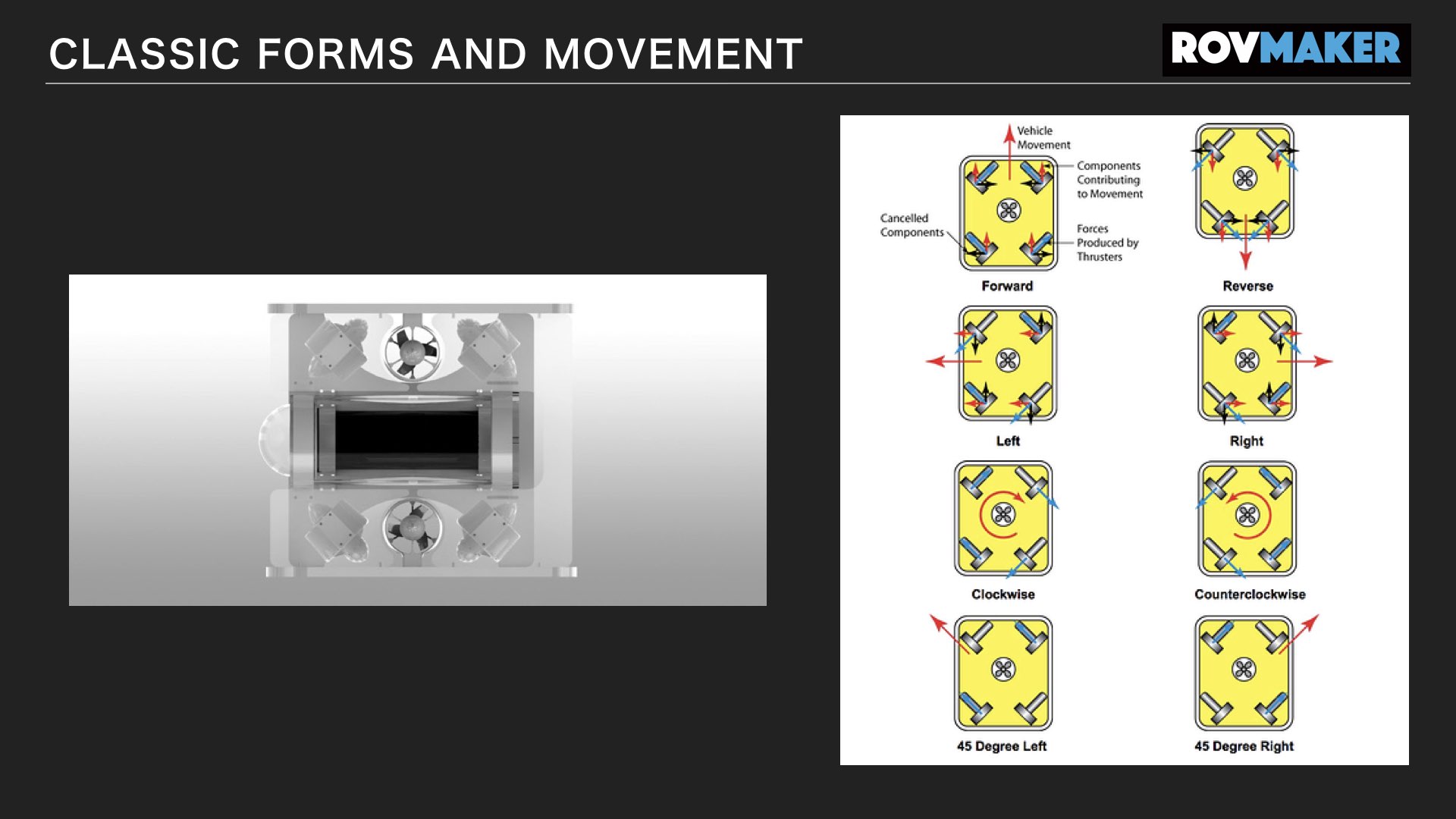
这是做的另一款edge的布置方式。
能够完成平面任意方向的移动。
我把思考和经验总结为这10点。
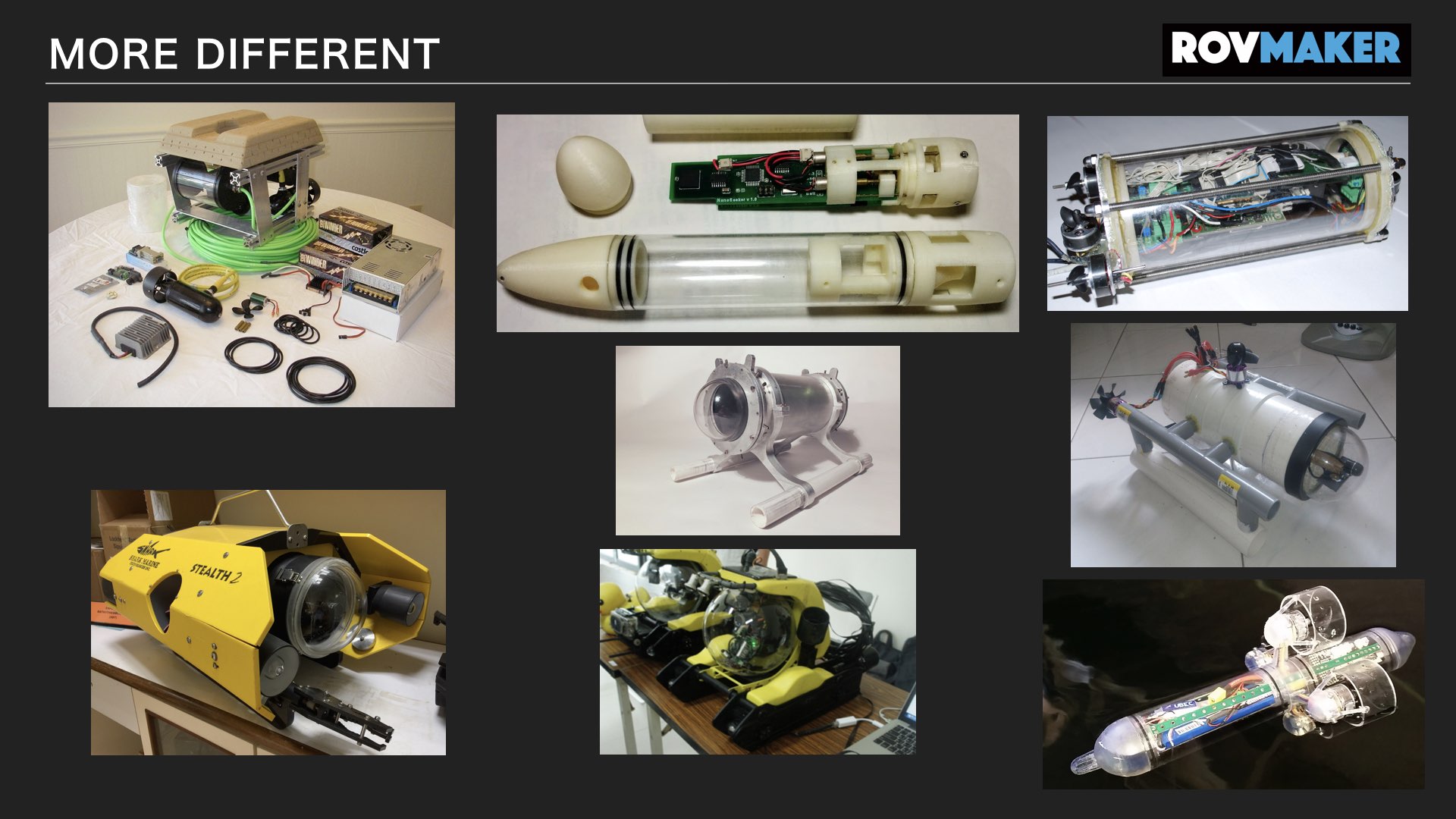
当然,不能局限于刚才提到的一些经典布置方式,为了有趣和好玩,抛开运动性能仍然有很大的想象空间。因为运动的阻力绝大部分和截面积有关,外形也完全可以不受拘束。
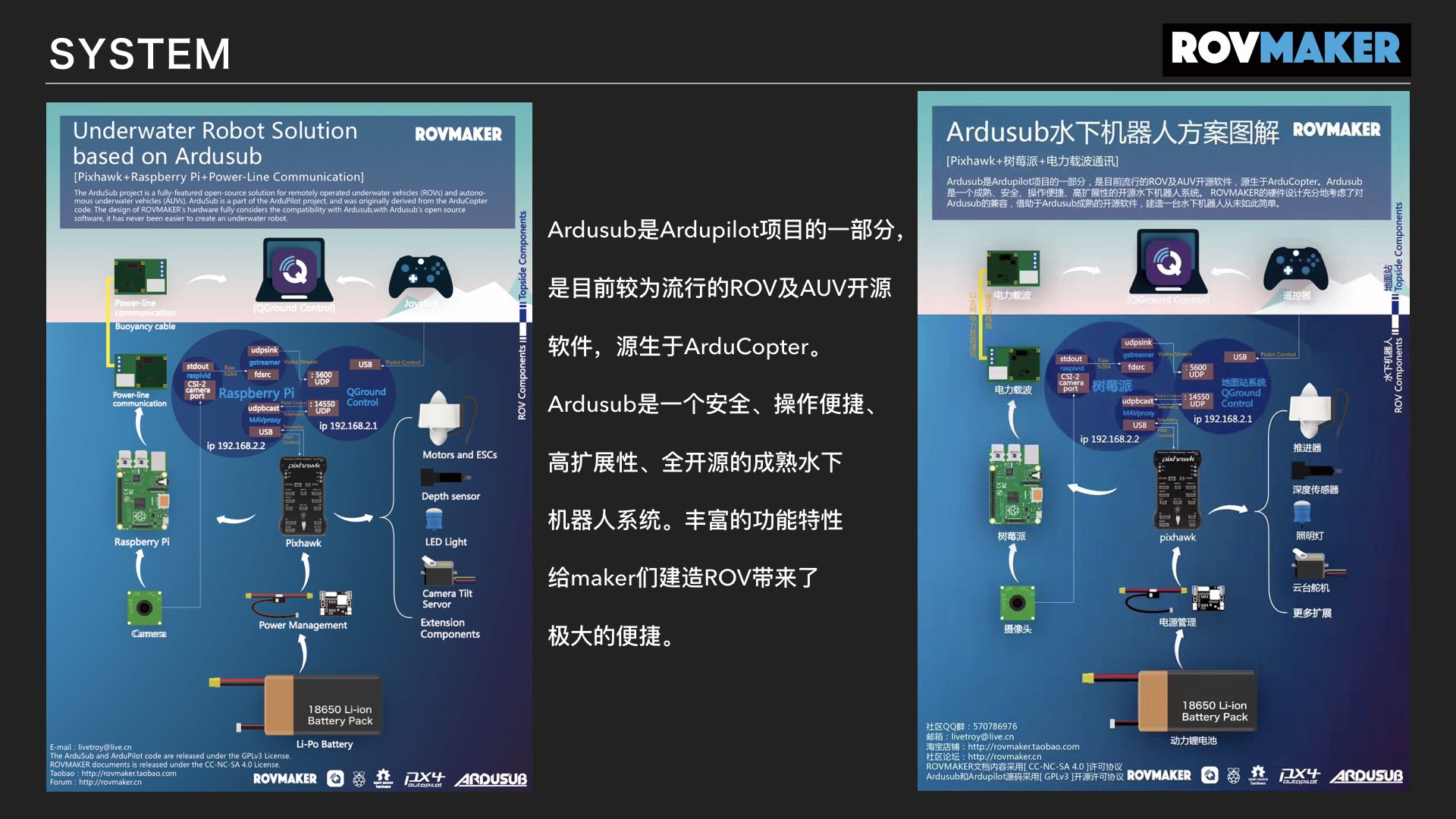
整台rov的系统简图大概这样,分为地面和水下两方面,中间通过电力载波线缆连接,地面信号从以太网传到主控,由主控控制电机并传回视频和个传感器的信号。
当我们知道怎样安排推进器位置和数量之后,需要选择一款合适的电机。经过测试,在淡水中,空心杯无刷电机也能保持一段时间的寿命,但是作为rov的动力需求显得微不足道。所以可以选择无刷电机,航模无刷电机的接线绝缘防水之后完全可以在水中使用,不过基本上用一次就报废,所有部件都会很严重的生锈,寿命很低。现在可以买到的推进器价格都不便宜,一般是磁耦合或者动密封的结构。每只大概上千元。
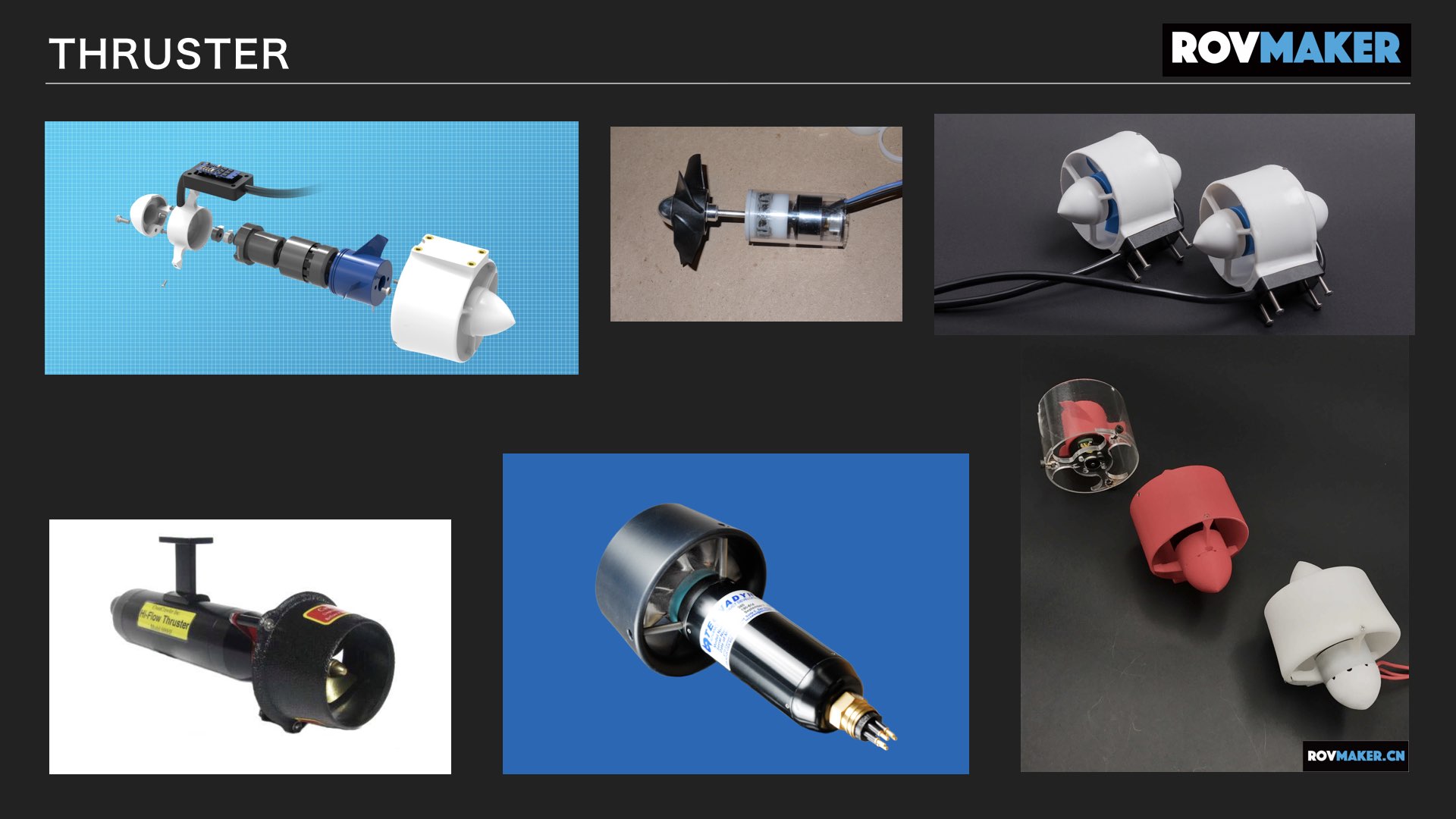
所以在着手设计水下机器人之前,先设计了一款无刷电机,我们称之为开放式防水,把无刷电机的所有部件防腐防水处理,量产了一款廉价的水下推进器。
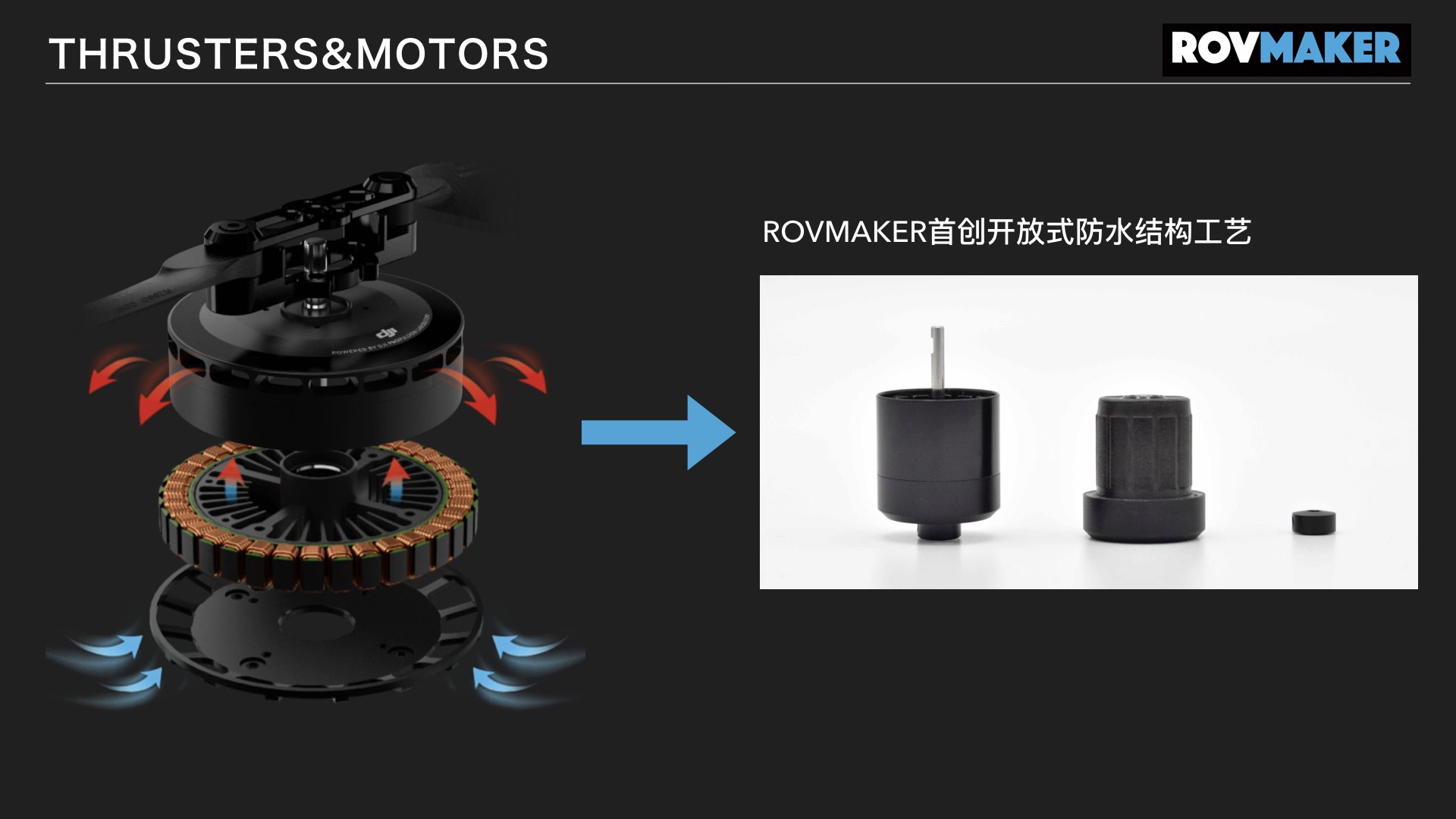
关于水下的密封,我们提供系列尺寸的密封舱配件,配合舱管保护电力器件,也提供很大的浮力。对于密封舱的对外接线,通常可以用空心穿线螺丝或者水密接插件实现,过线之后用海水专用的环氧树脂灌封,环氧树脂的灌封过程很简单,混合搅拌均匀放置一夜就可以凝固,完全可以实现数百米深度的耐压,选用海水用的树脂最佳。110亚克力密封方案经过实测和计算,可以达到一百米的防水耐压能力,110铝合金达到三百米耐压深度,更深目前还没有测试过。对于其他方面的密封比如电机的动力输出轴,还有磁耦合和机械密封圈可以选择,不过我仍然觉得电机开放式的防水更佳方便,体积也更小。并且传统方式的密封方法寿命并不高,而无刷电机的寿命可以完全取决于轴承和各个部件的防腐耐磨能力。

电子部分的最简系统可以简化到很少的器件也能够扩展的很复杂。主控,脐带线缆通讯,电机,摄像头,电池是最基本的部件。

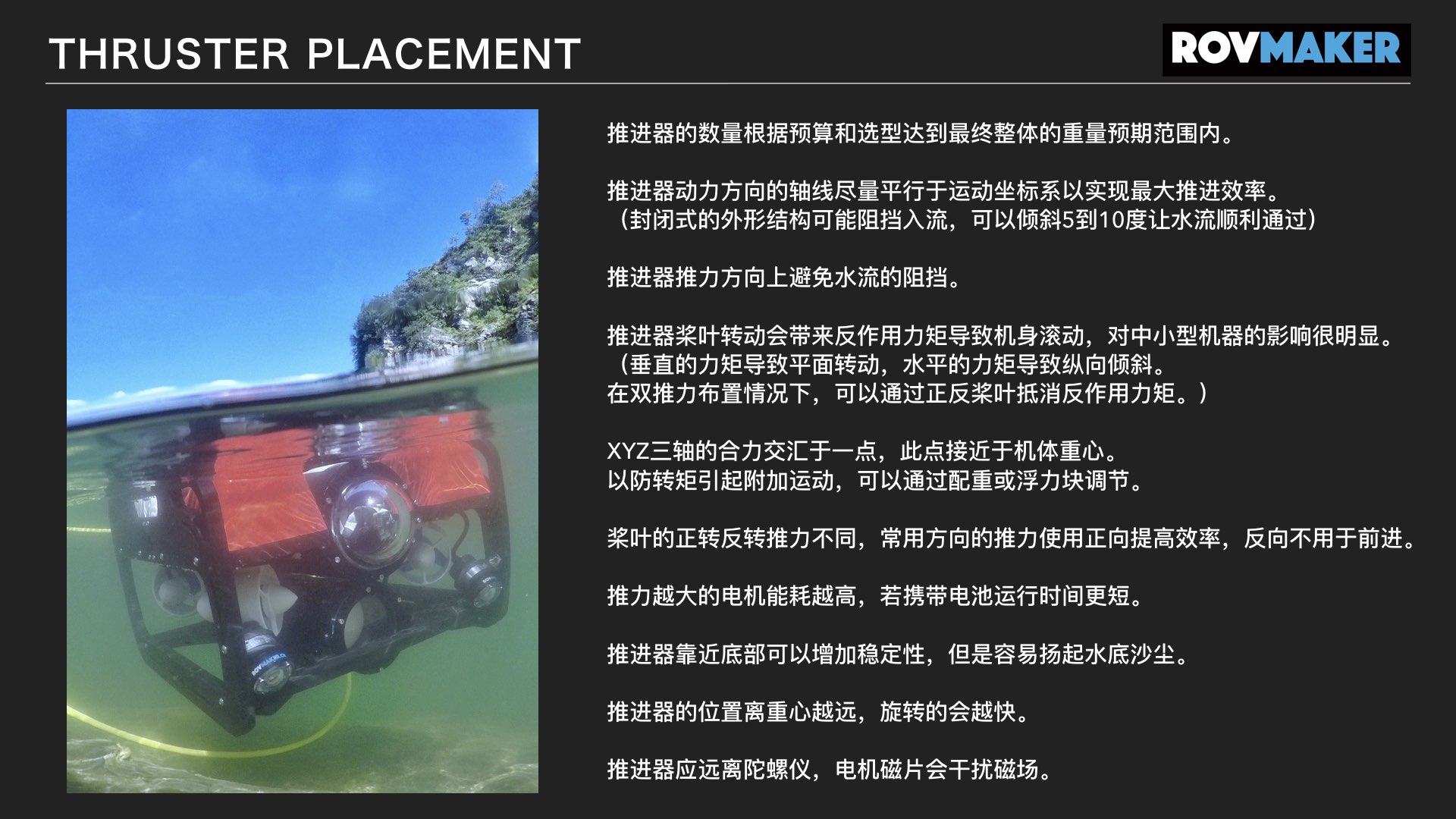
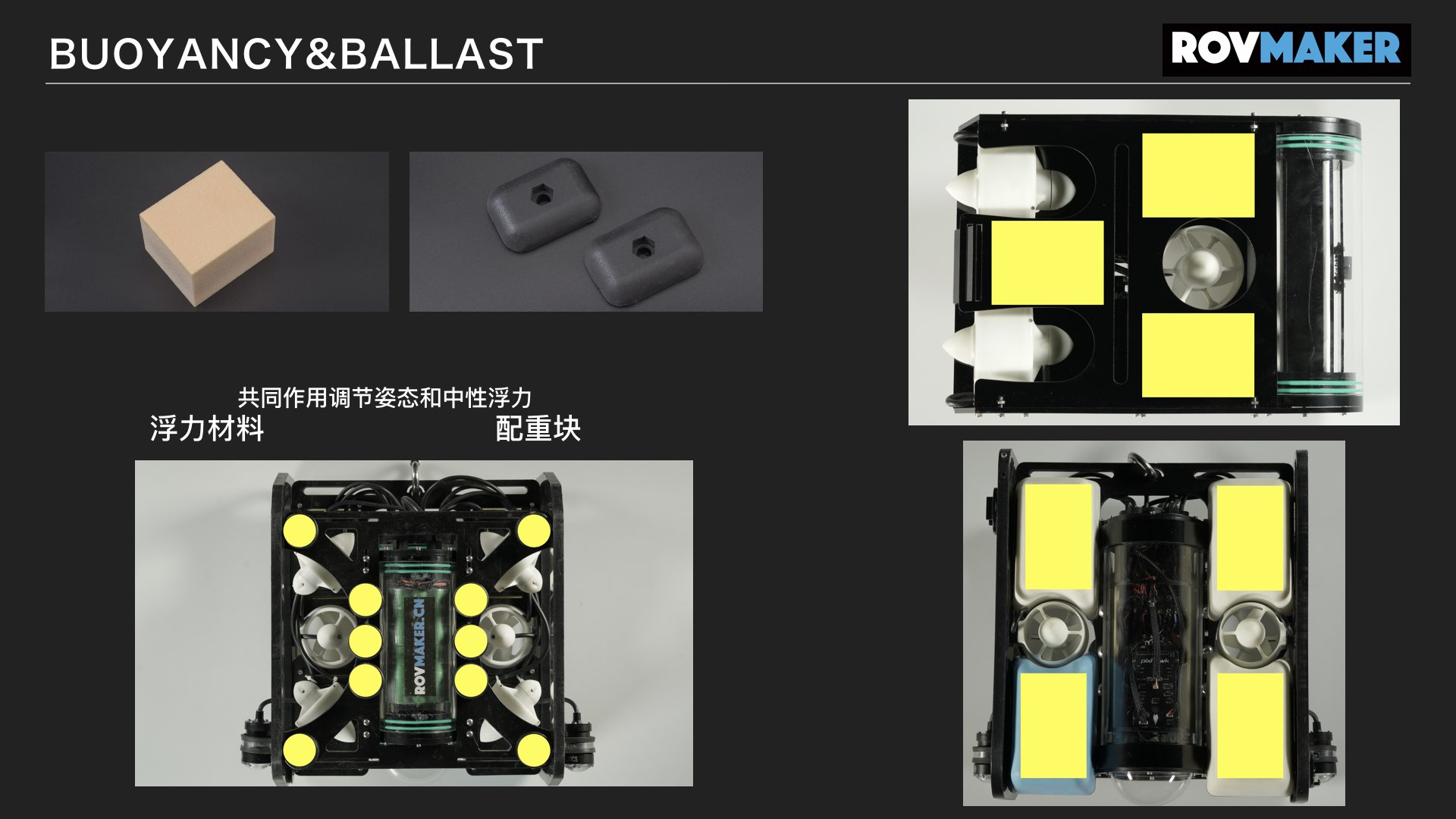
框架完成之后需要实测在水中的状态,然后用浮力材料和配重块调节姿态和中性浮力,让整体稍微漏出水面一厘米左右,密度和水相差不大但一定要有轻微的浮力,而且重心偏下,姿态稳定。
线缆按照自己的需要选择一款零浮力线和舱外的接线。一定要注意耐压深度,一般的线缆不能保证100米的耐压,线皮进水会产生各种问题。

rov的线缆如果不能插拔操作会很麻烦,所以需要选一款水密接头,进口接插件一般能达到7000米深度的防水价格很高几乎没有提供浅深度的接插件,对于大部分人需要做的超出需求太多,我们提供400米深度级别的水密插头。当然完全可以用空心穿线螺丝代替。

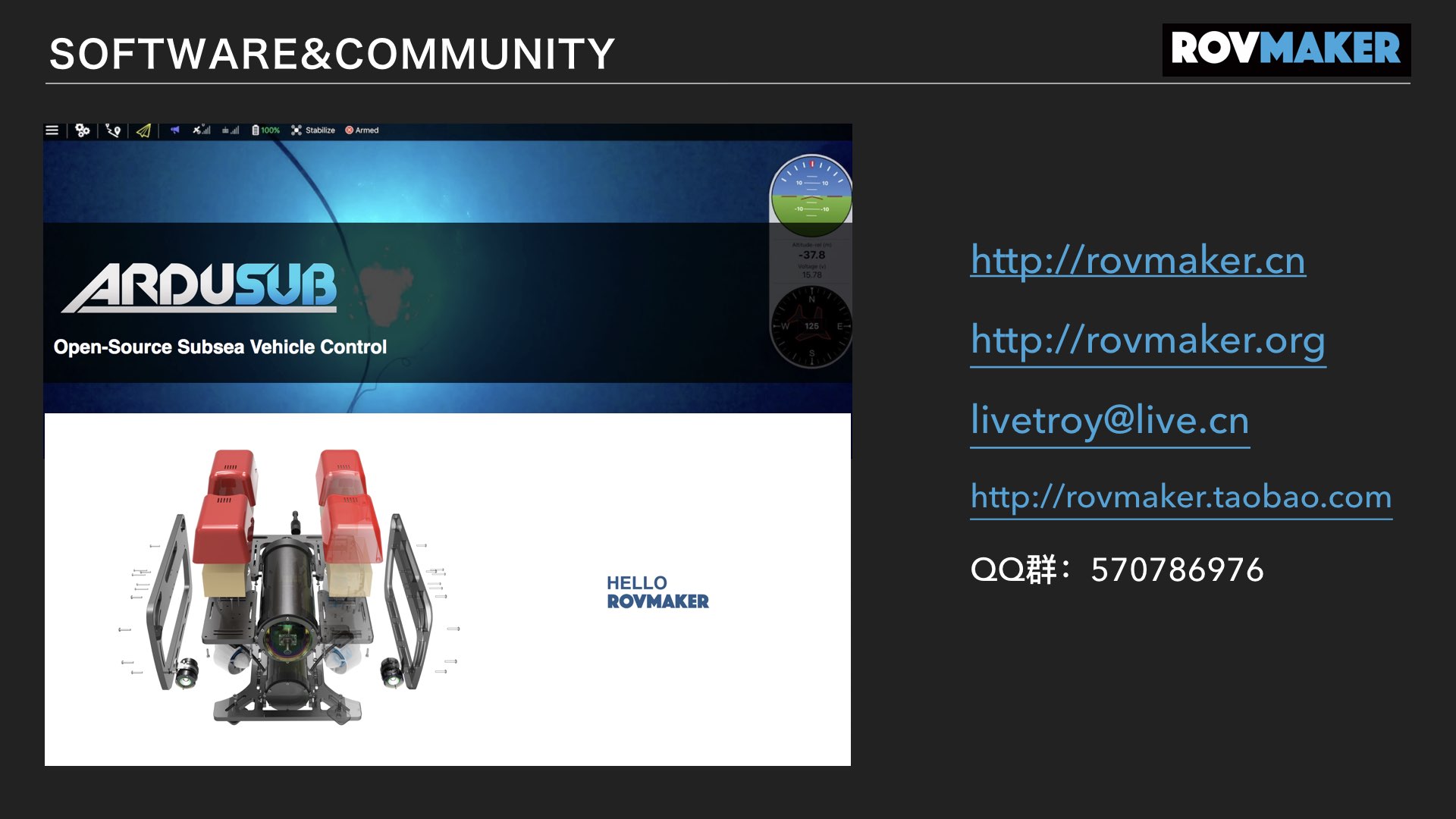
水下机器人的软件部分可以用ardusub,支持pix飞控,树莓派等常用的主控,地面站软件也基本成熟,可以随意更改自己的推进器布置配置。
然后是一些下水或者下海前的注意事项。