11194
22
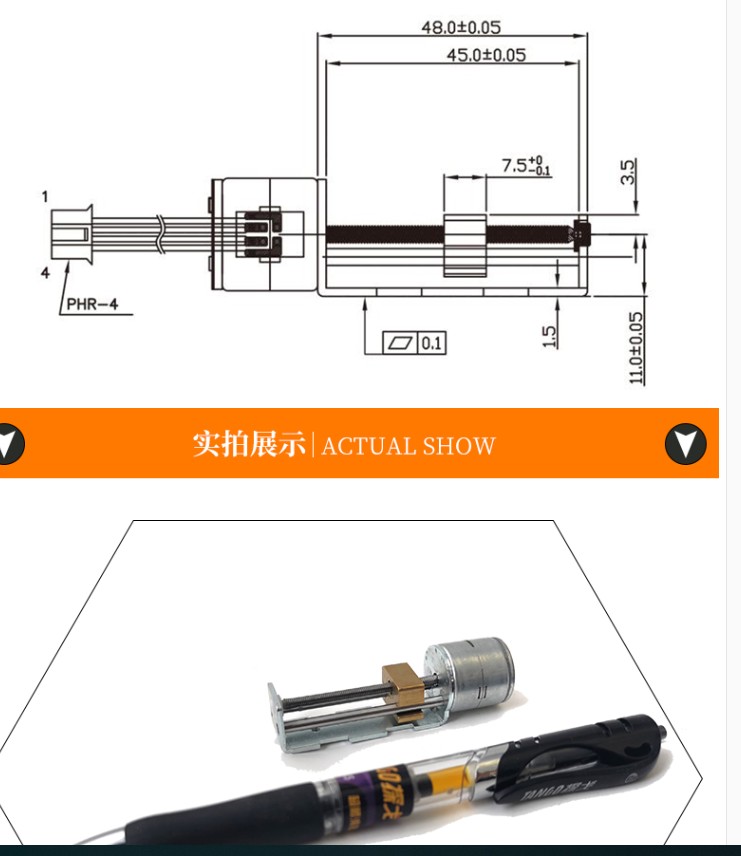
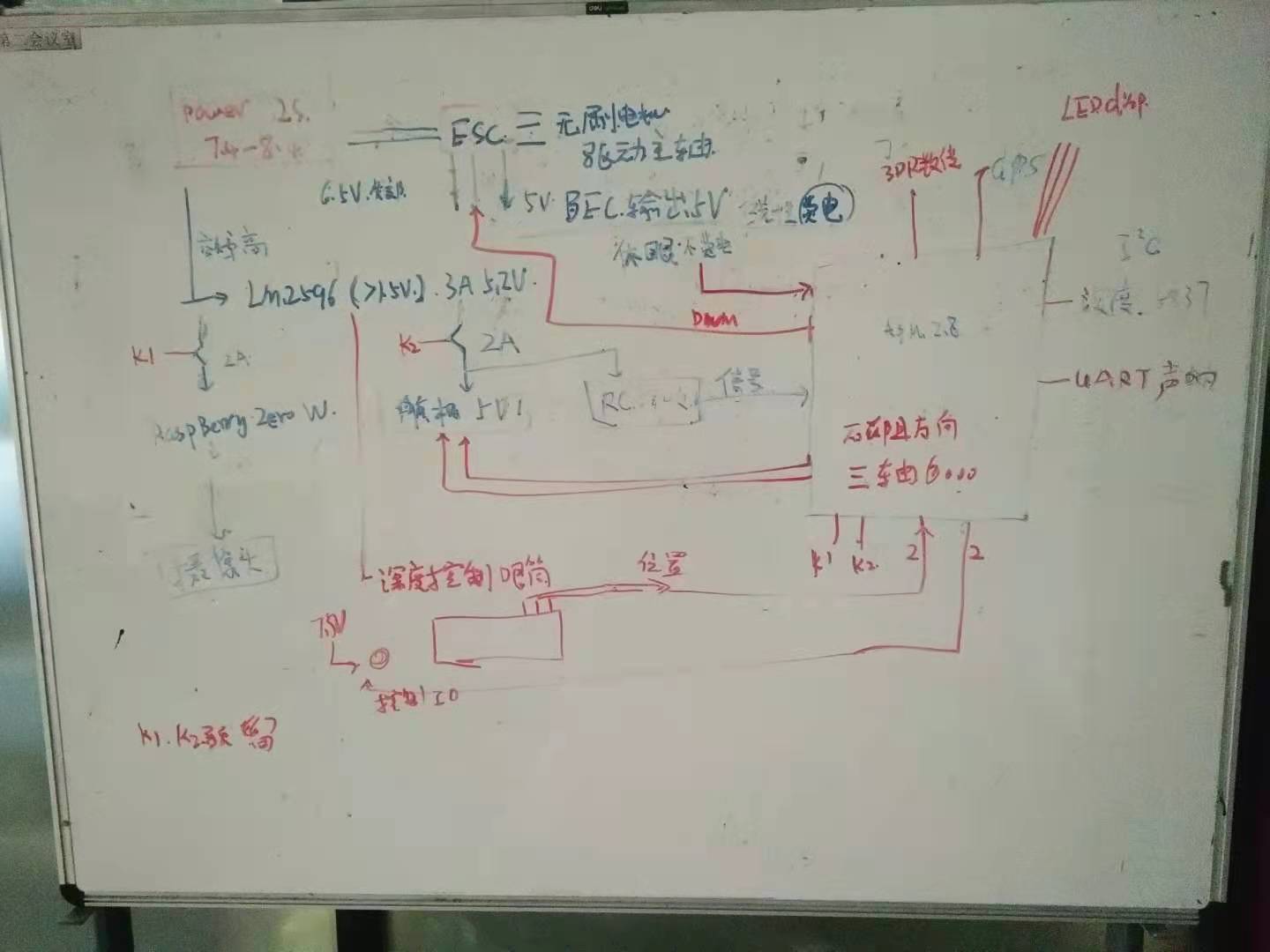
针筒上的螺纹刚好用.还有丝杠.把中心齿轮转大,挤压进入 再放点螺纹胶水.保证产品强度.重新在那个细的针筒盖子上定位.就可以完成唧筒.再加上霍尔传感器,开关感应芯片…
软件上,已经可以编译 apm 软件,还有c# 的上控制站.
目前开发环境我到时都整理下.上传到gitee.上国内网络快.
11194
23
不知道一个小滑台能不能放上去。用来平衡,水下吸水后平衡,还有水面排水后平衡。还可以做成,固定俯仰状态
。
11194
24
欧赛龙通讯协议(中文-VerL30通用版).pdf (200.6 KB)
更新下ii水下超声测距的PDF.
11194
28
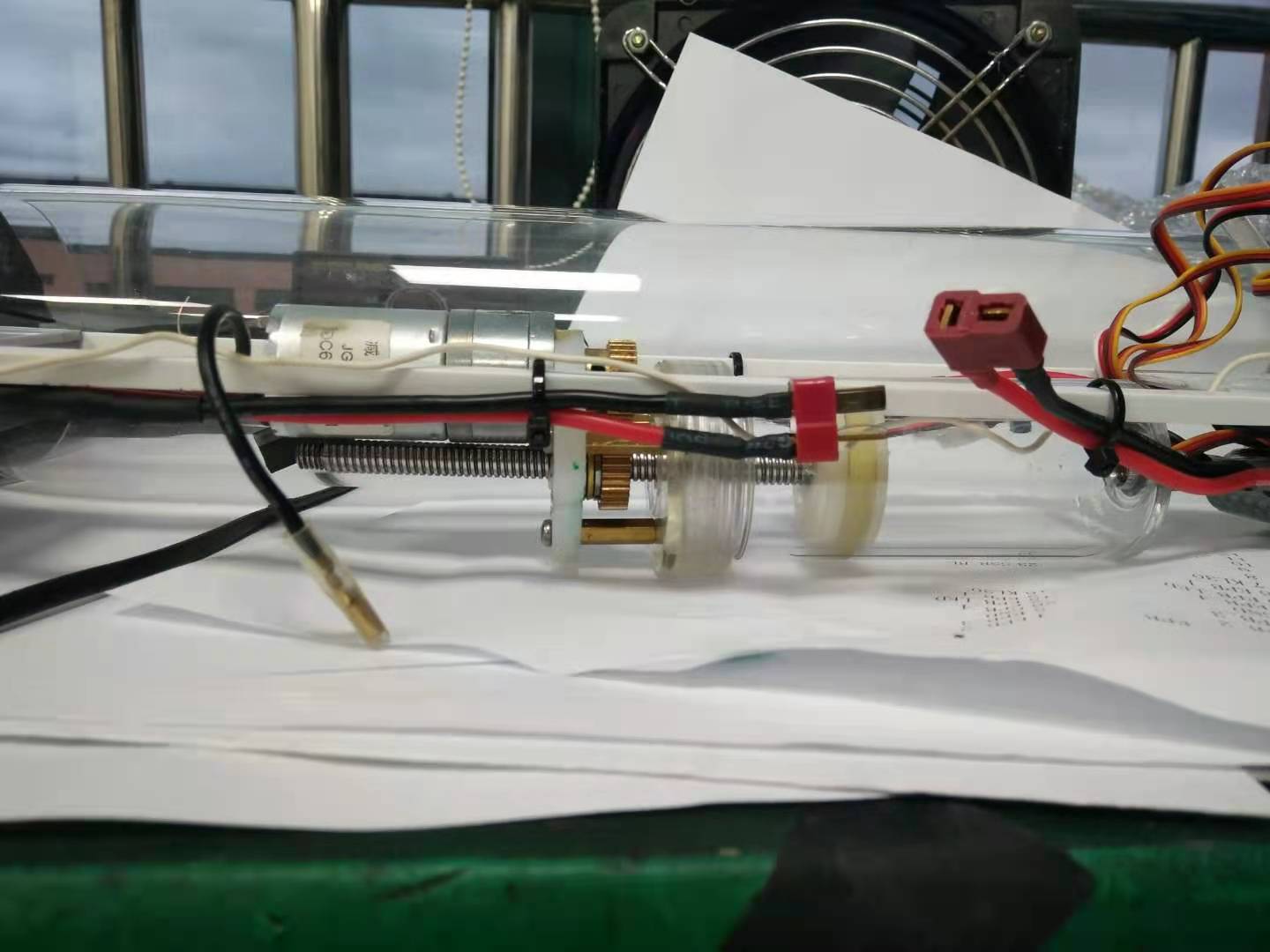
明天把三个柱子放到小打针筒上固定。推力轴承放好。起码的整体拼装调试。
11194
29
链接:百度网盘-链接不存在
提取码:jjmz
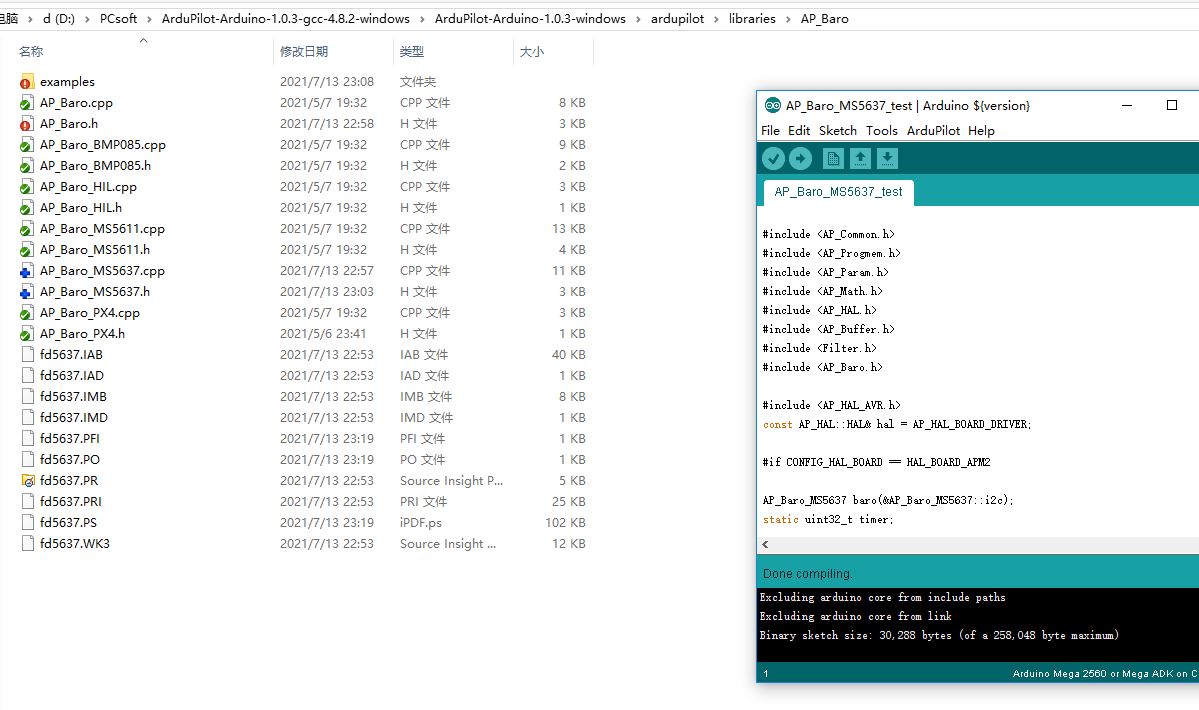
ArduPilot-Arduino-1.0.3-gcc-4.8.2-windows win 电脑开发环境。(外网难下)。只能支持APM 2.8.0以下硬件。软件只支持3.1.5 以下。
源码的话还是要用GITEE 下载。
操作连接如下。我应该单独做一个分支。单独处理APM2.8.0的潜艇的。
告别龟速,极速克隆 PX4/ArduPilot_阿木实验室的博客-CSDN博客
目前视频APM 源码学习学的是 怒飞垂云。APM常用参数设置方法(持续更新) - 怒飞垂云 | 无人机知识库 视频教程,也只能说是入门,如果要深度改造,应该比上面视频知识面要更广。
11194
30
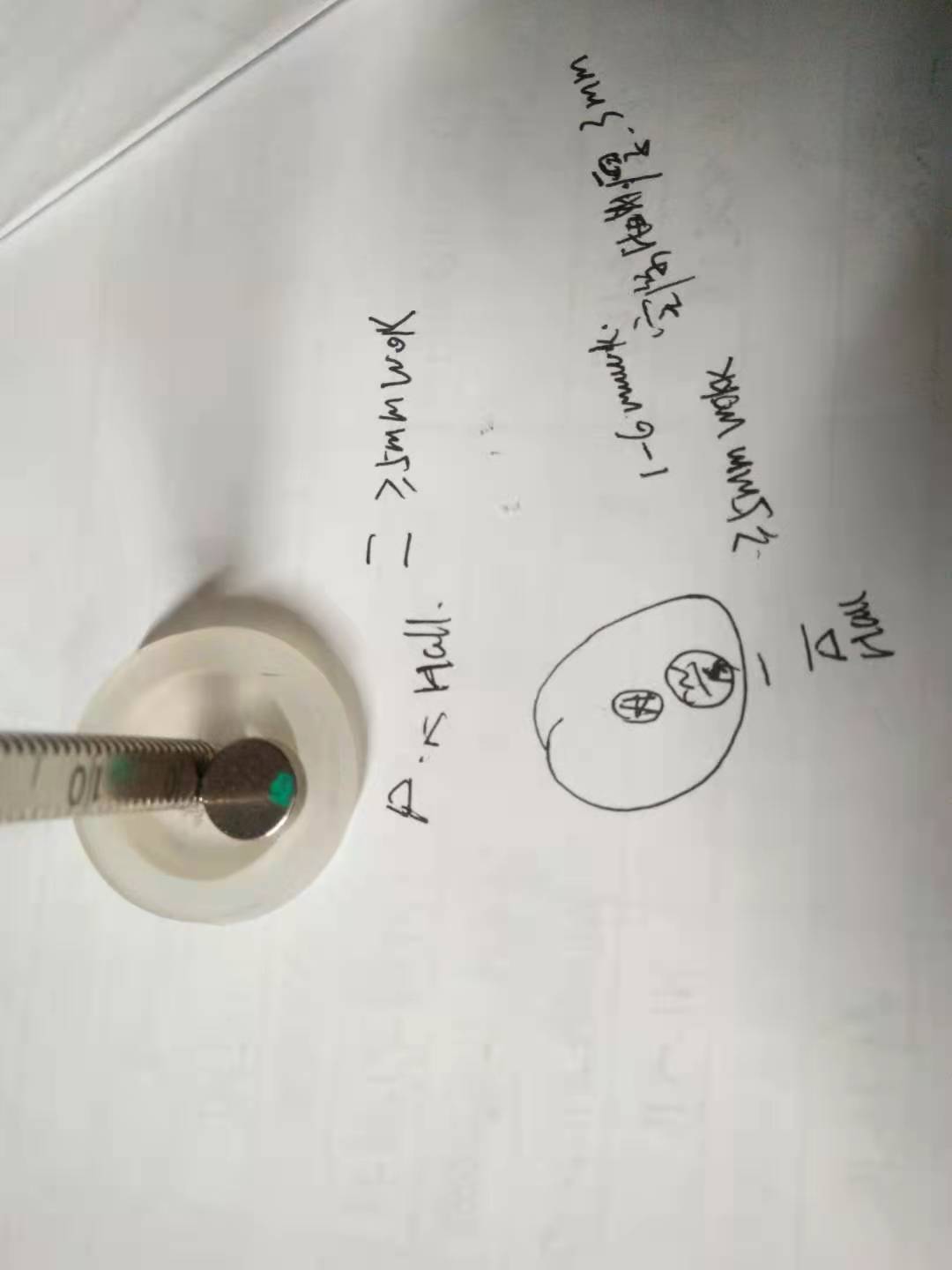
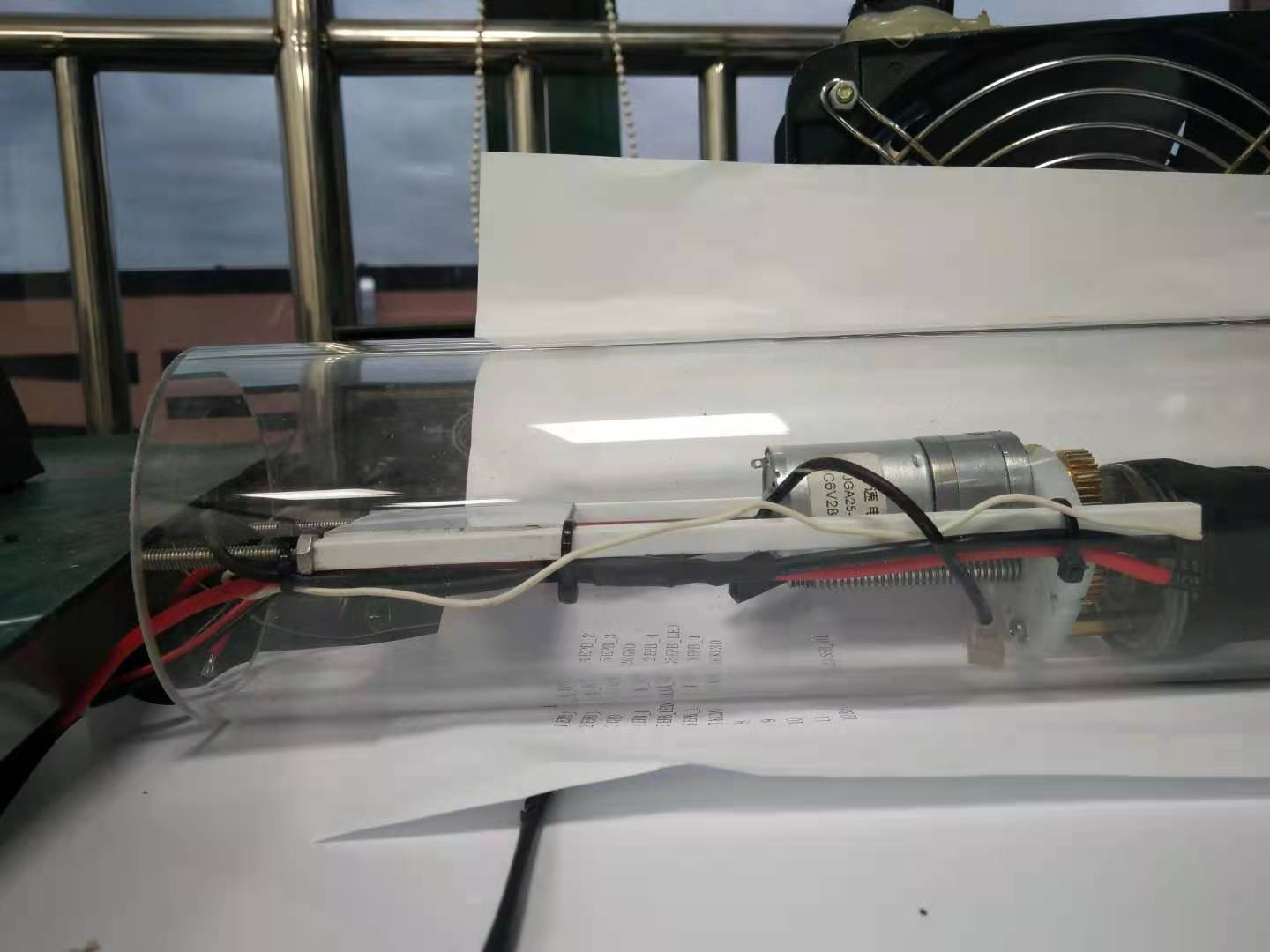
单个成品图,这周把磁铁粘上。霍尔传感器接上测试下。
11194
31
原来150mL 现在是50mL 最大化的利用针筒。原有设计。
11194
32
要好好安装下,多余的部分可以去掉。把主轴部分尽量放下面。中轴线下面。
11194
33
目前还有些材料.可以做再做几个 .有需要的同学联系我.我也以(成本 +1包烟的加工费(给机械加工师傅)
11194
37
微小的压力传感器.减小体积,密封胶已经到.考验软件的时候开始了.
APM2.8 用plane 模式改造成SUB 先做好手动模式测试整个系统集成情况.
11194
39
按最近的例子,复制文件夹。做一个5637的文件类还有测试程序编译通过。
11194
40
502胶水粘好的唧筒。要增加 霍尔芯片感应了板子了。
目前发现编写的程序要台架测试。不然。集成后测试就不好测试了。