



ardupilot APM SUB 算法 逻辑增加如下.
目前采用Ardupilot plane 3.1.0
目前apm 软件的架构还在学习中.
这周看看是否可以把两个传感器集成进入到APM程序中.
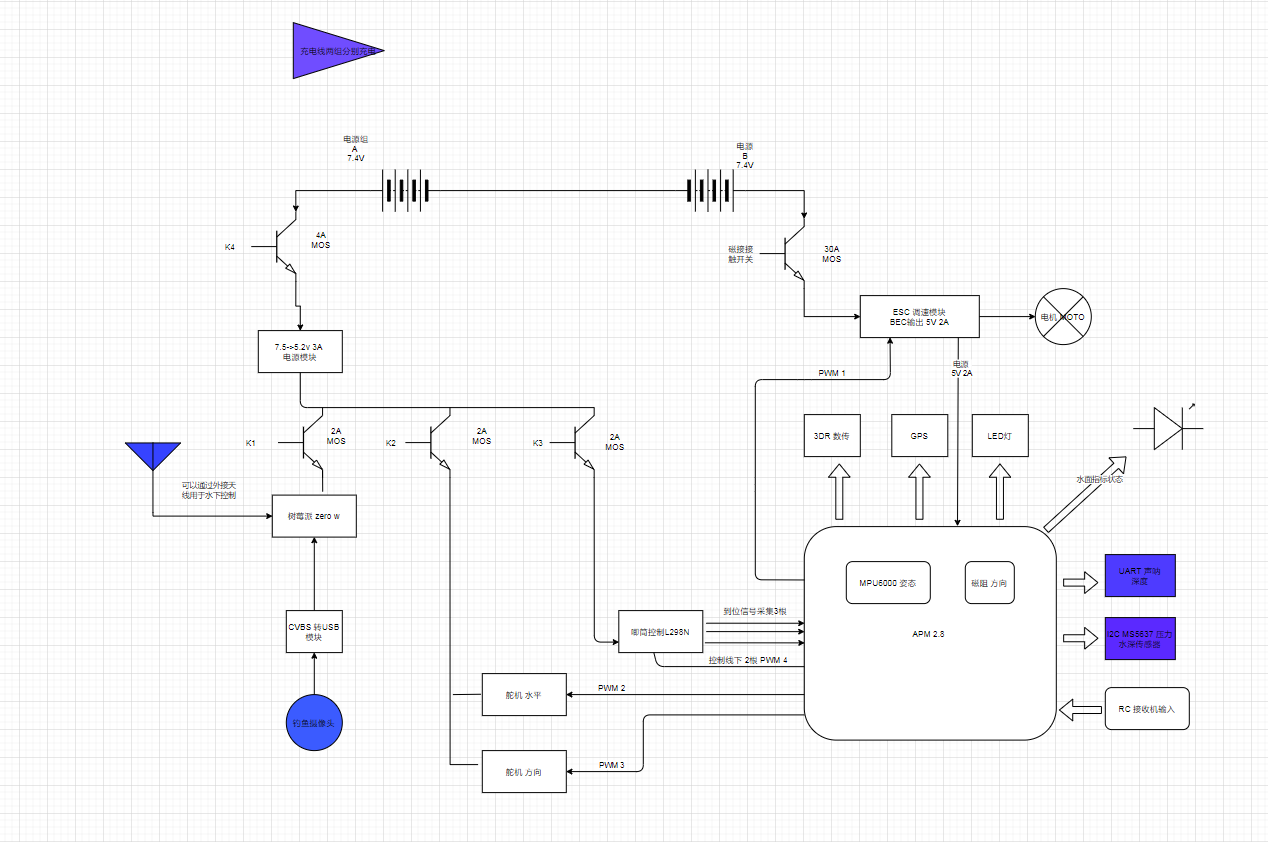
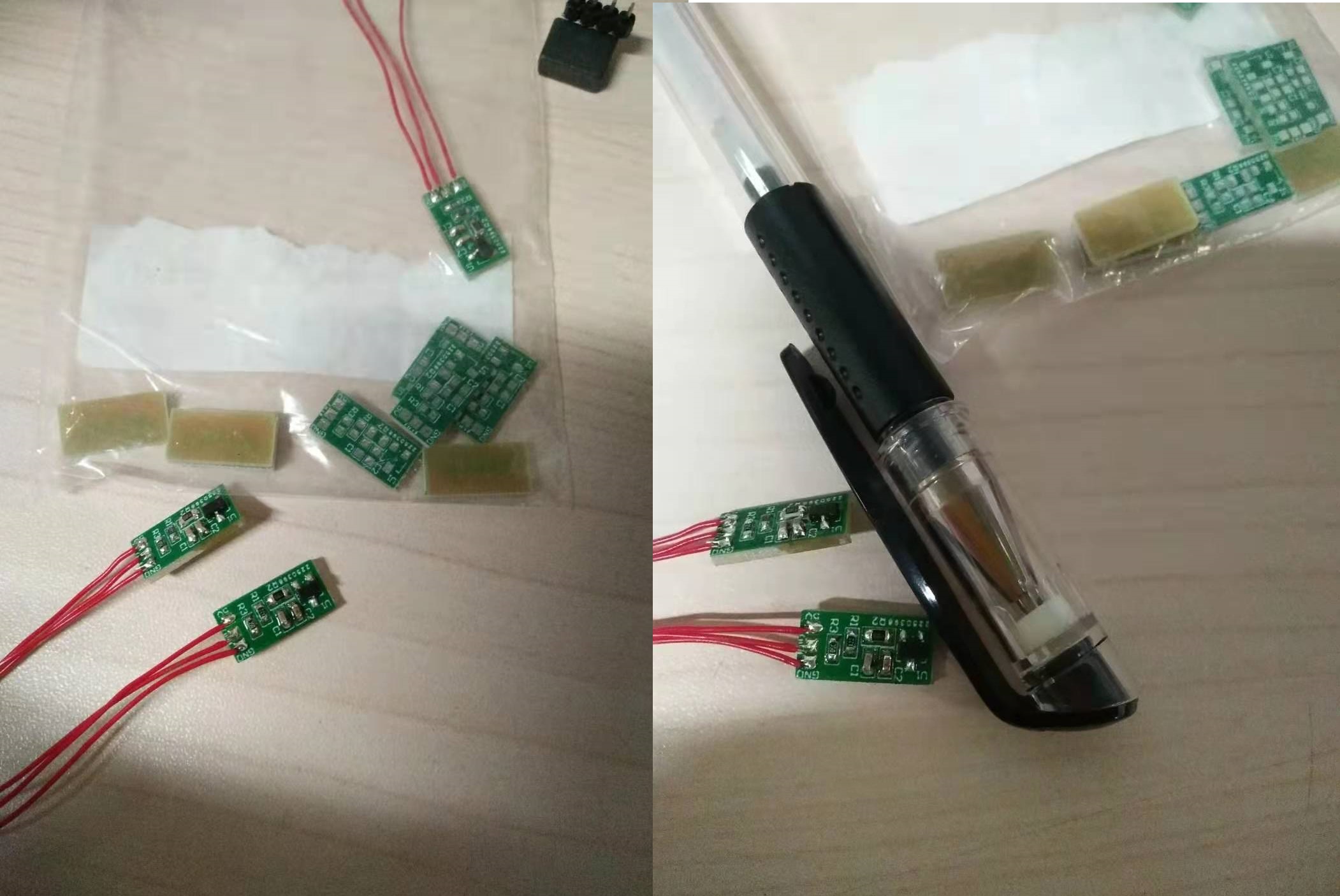
传感器1.ms5637 与目前已经 有ms5611.协议一样.最后压力的运行参数不一样.
同时用的是I2C协议.原来开源的程序已经做完.我要做的就是切换通信方式,更改通过协议.条件编译切换
把气压高度计算逻辑更改为淡水深度计算.没有空速计.
传感器2.深度声呐传感器目前程序写好.但如何集成 测试还要学习下.
计划增加两个控制模式
仿地控制模式.主要是对水低的未知深度做探测.及相关摄像分析.
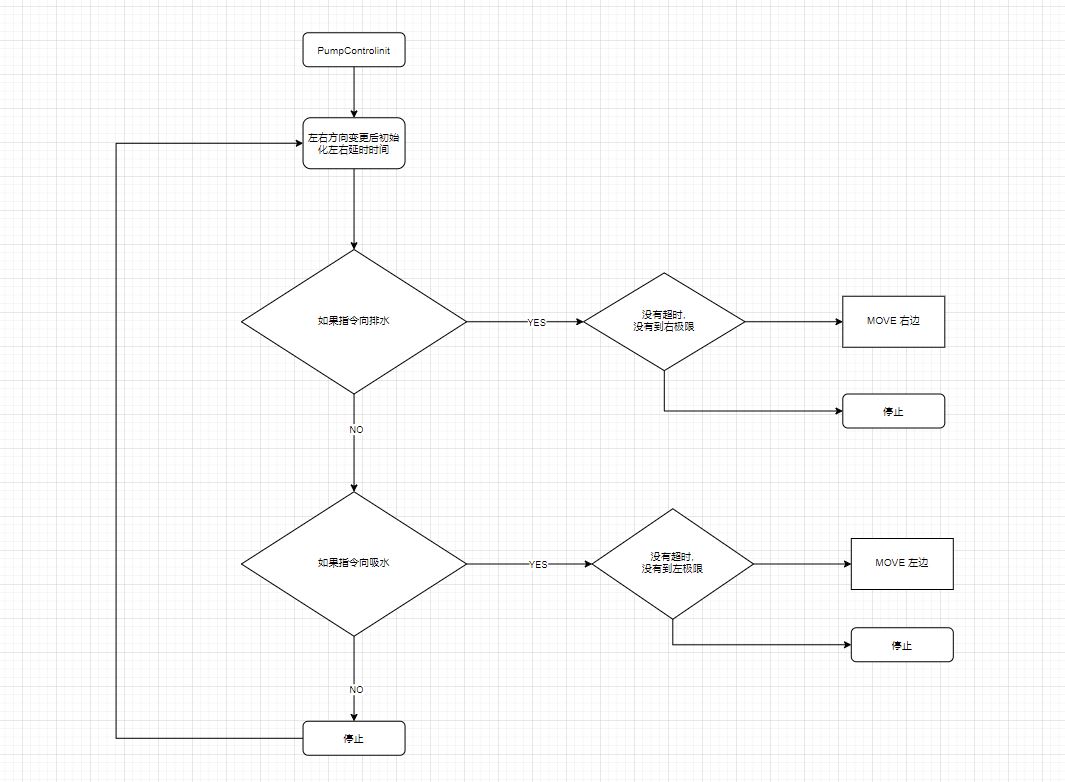
定点模式用来调试自己的姿态.(主要用唧筒做逻辑,做深度控制)
手动模式中,不需要 roll 的控制.就是横滚.默认姿态稳定 .
手动模式中.需要控制的就是油门.俯仰动作.和偏航方向…这个尽量在定点模式完成后.(或者先手动调整唧筒水量.)

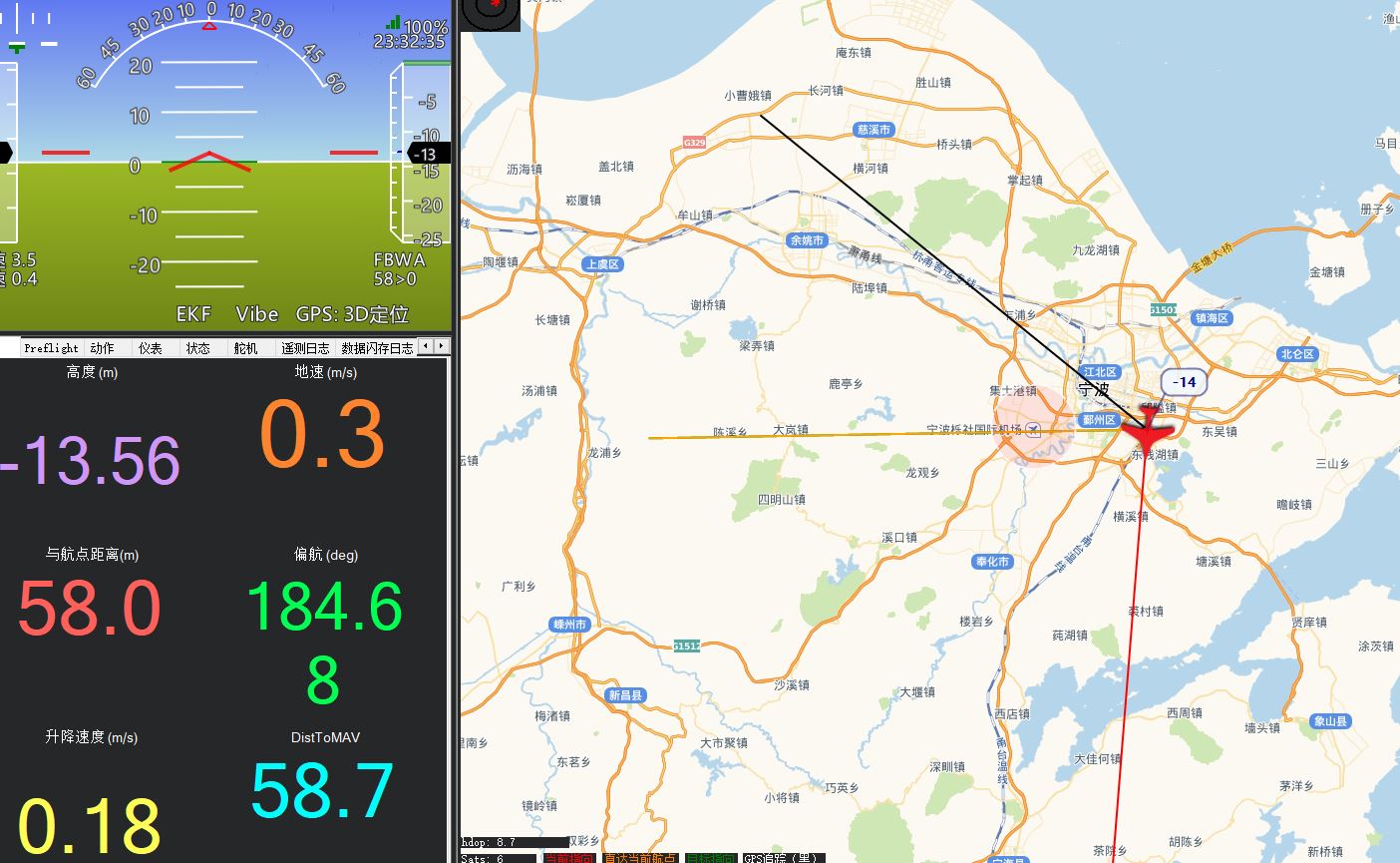

目前已经 初步对这个上位机了解了.还有对校准过程.
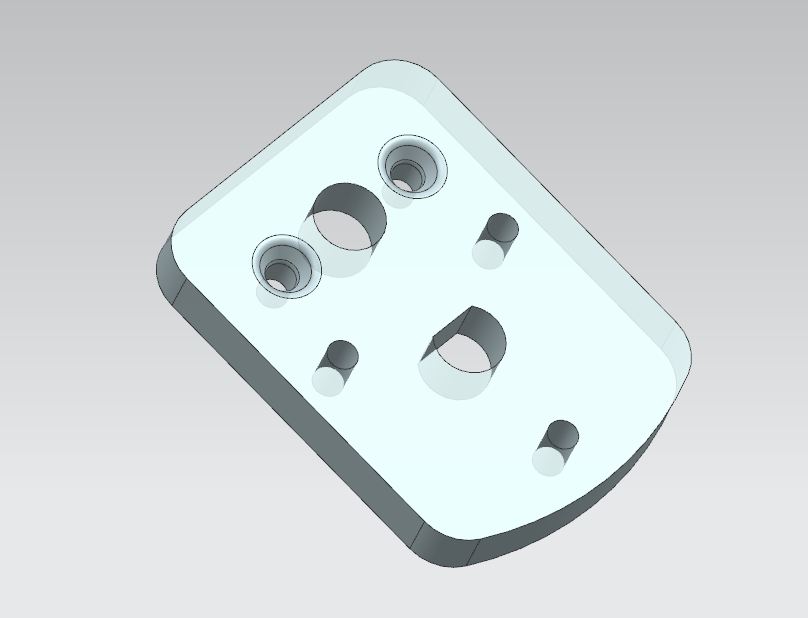
目前已经 把这个APM2.8 ardupilotplane V3.1.0 开始更改.把外部扩展LED 的部分更改为pump 控制及检测逻辑…
ms5807 就是这个APM上贴的已经校准测试过.因这个硬件问题没有直接测试I2C通信.关闭这个或者焊去这个空气压力.用外部的引脚测试MS5637 30bar深度.



/www.bilibili.com/video/BV1NL4y1e7az/
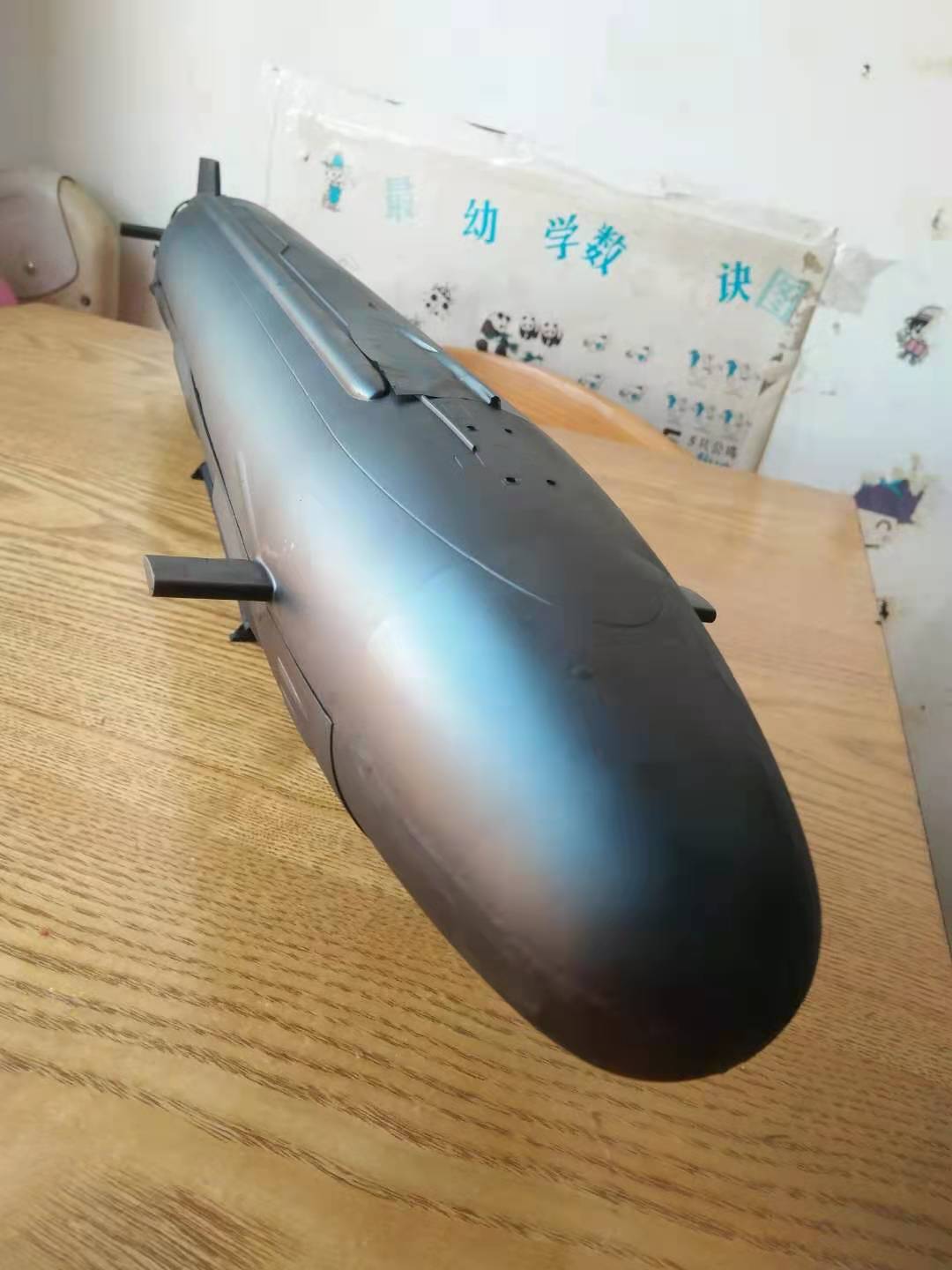
测试视频…唧筒
1 个赞