3D3D-CAD数据s.zip (46.6 KB)
数据.

重新测试的视频。加上测试平台


https://www.bilibili.com/video/BV1eq4y1d75K?from=search&seid=262502741802382389&spm_id_from=333.337.0.0
新的测试视频.基本可以入水调节衡了.
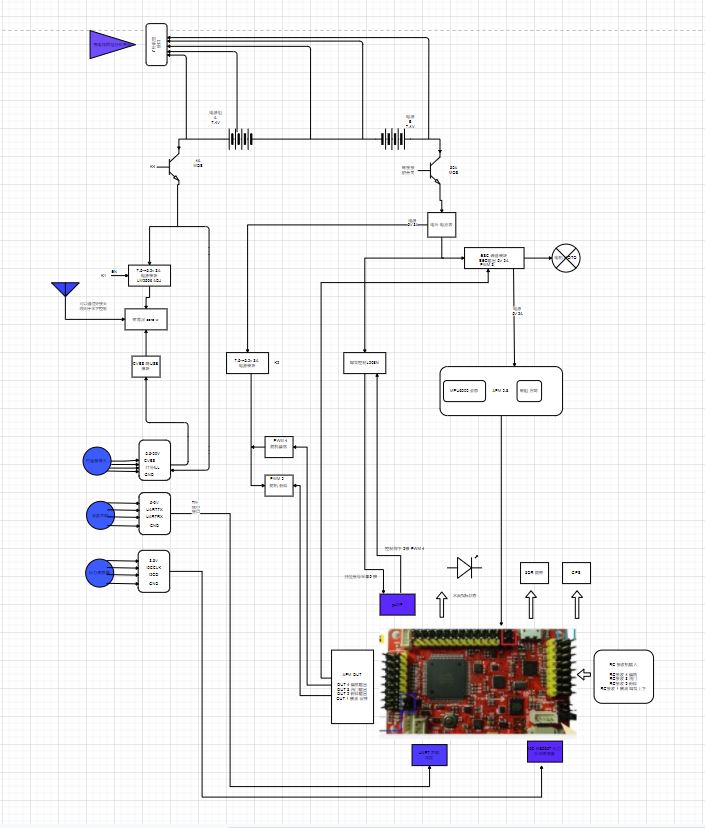
遥控潜艇电气图v5.zip (51.4 KB)
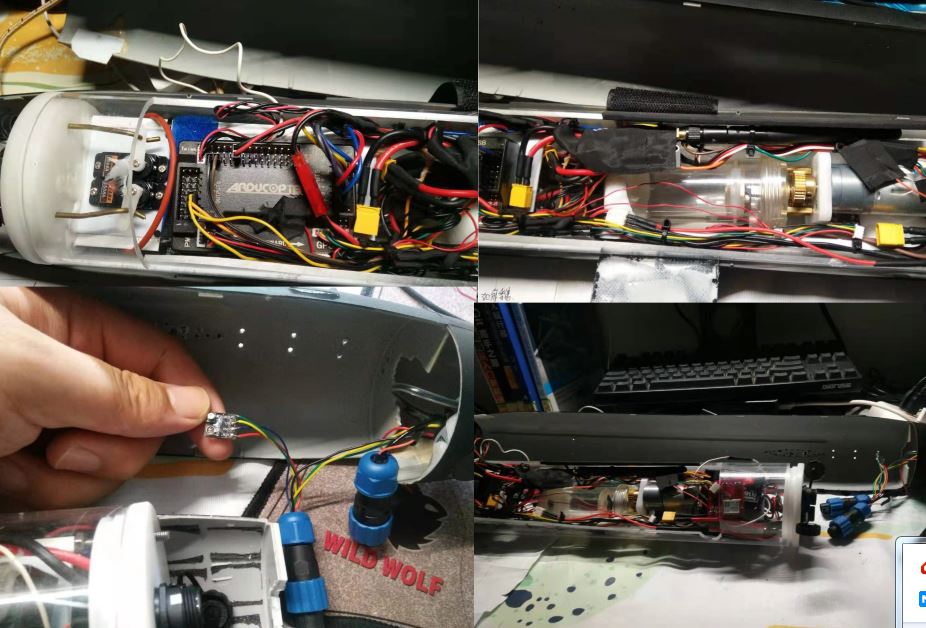
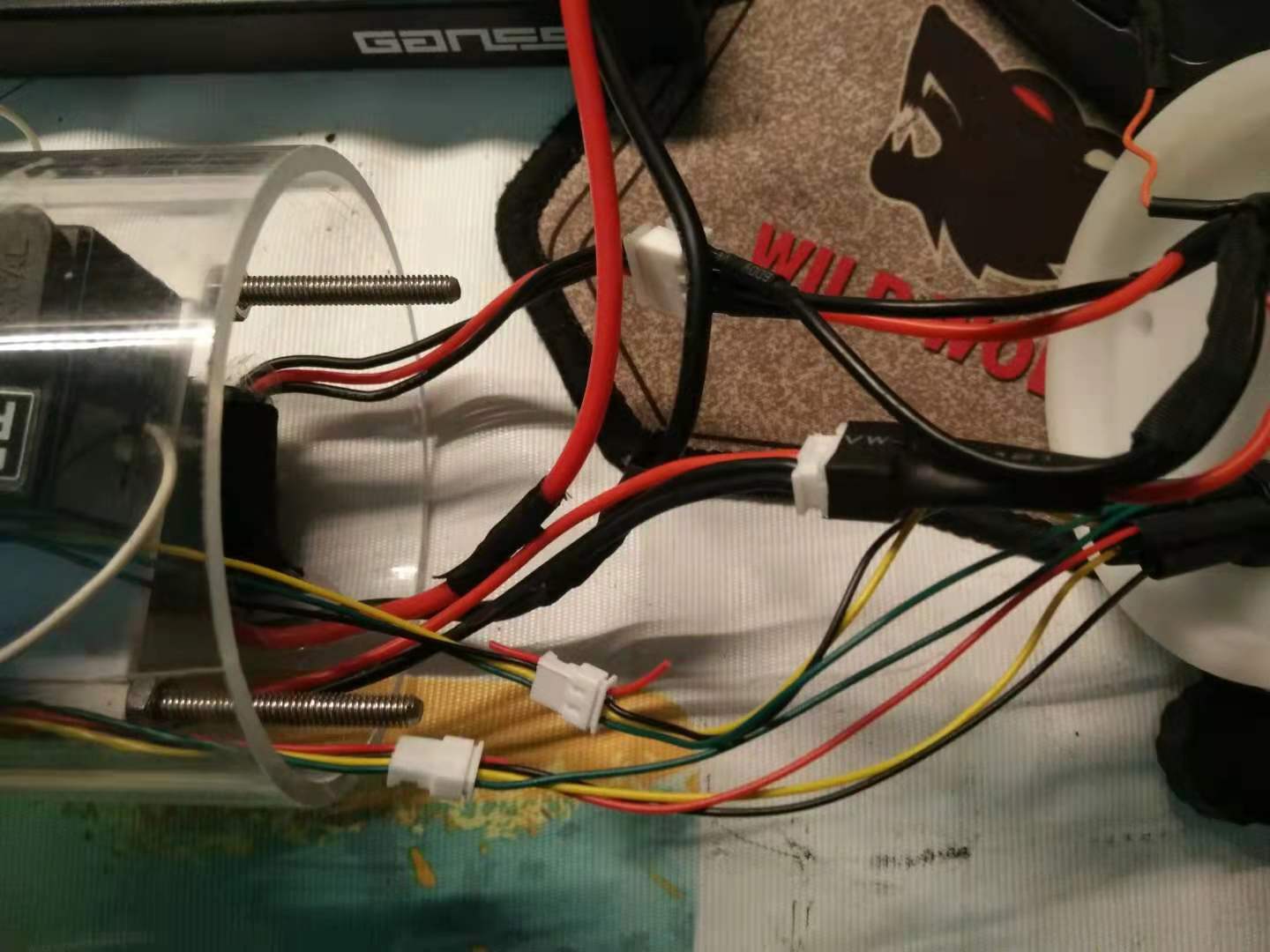
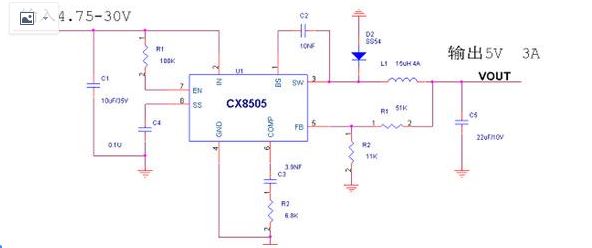
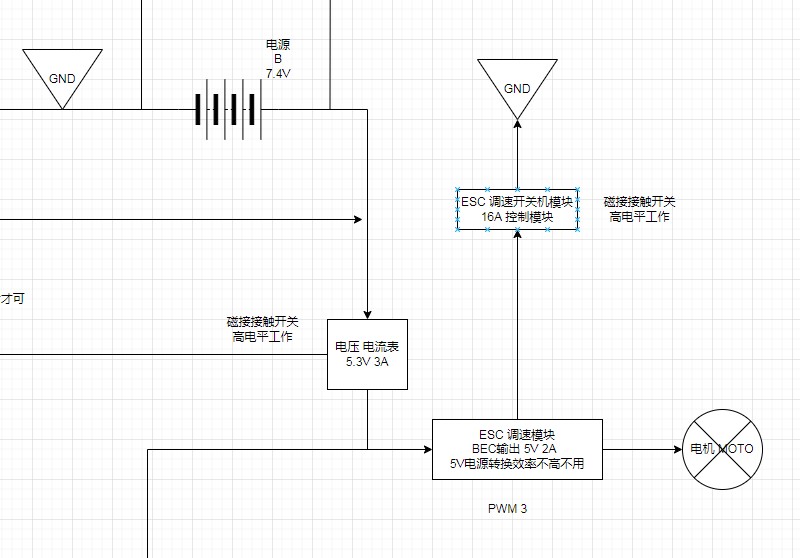
更新电气图,系统的供电由两个3A 的开关电源来管理 ,主8V电常电给一个开关霍尔,由开关霍尔来管控后面5V的供电,可以保证系统在休眠时只有很小的消耗.把开关霍尔拿开后,系统正常供电.
就是由两个APm 2.8 的电源检测及电流检测电路来供电,开关霍尔的控制两个电源EN 引脚.
买了个1.2m 折叠浴缸.方便测试.周天验证配重,平衡.唧筒功能.信号丢失保护逻辑.

潜艇经过简单配重,完成沉浮验证。
增加了个应急出水功能。动力上还没有处理。到时也要去除动力。然后在河湖测试的话。如果有紧急情况。要浮出水面。。呵呵。临时版本的定深已经好了。周日再上测试视频。
已经调整过模式.
A 手动模式, 可以操作所有
B.定深模式,切换到这个模式,潜艇要定深,
C.RLT 动力为0 紧急出水.
D.AUTO 还没有开发完及验证.