11194
81
调试界面.想要做的逻辑基本完成,可以去河里面,或者湖里面验证下,收集下水下的信息了.
11194
83
增加了定深测试视频,因为潜艇的惯性比较大,所以逻辑上要做到如下等待验证,
控制延时3-5S.也就3-5S做下逻辑。同时 在深度附近吸水排水量要小。
11194
84
水中摄像机拍的照片,后期可以用 防水的苹果手机录像,清晰度会更高。
发现如下问题,
1.算法要优化,必须要加上速度,加速度,来控制,不然位置控制的不对。
2.防水,能用专用防水胶不用其它,,防水胶需要固化等待时间,那就等待。
3航空接口也要用专用防水胶。
环氧树脂电子灌封胶黑色海水用防水密封胶耐腐蚀导热绝缘AB胶套装
,我用的是这个,目前没有漏水。用在MS5837防水。(上一个5837 漏水坏了,防水没好)
11194
86
5837 防水
也发现我的航空接口部分防水,有问题,也要用这个胶水重新处理下。
大神,我也想用固定翼固件,操控水下机,能发压力传感改水压传感程序教程吗
11194
88
5.1整理下。更改部分上传GITEE.后期我也做个视频,说明下更改过程。
11194
89
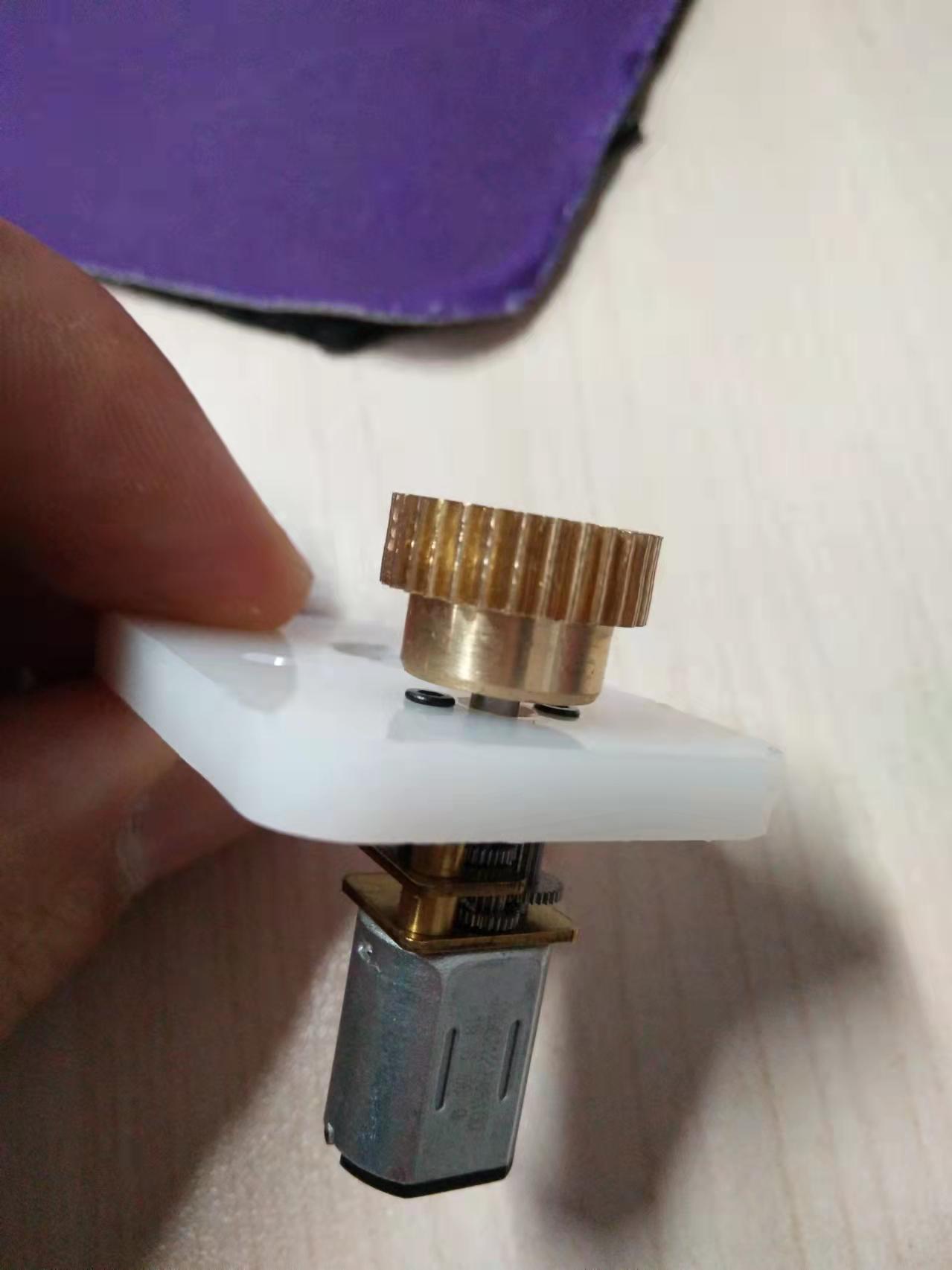
重新定了一个小电机。保证扭矩的同时,减小尺寸,减轻重量。
1 个赞
11194
91
增加了测试视频,主要是给调节纵倾的机构做空间调整。
11194
92
AP_Baro.zip (21.2 KB)
可以参考下。
能留个联系方式吗,想合作请你做个水下姿态控制及定位 微信:18915975050