pixhawk 1-8通道已经全部占用了,现在要加机械手,请问机械手的线要接哪个口?QGC里面需要对哪些参数进行设置,手柄按键要怎么配置?
机械手的信号线连接到Pixhawk 的 Aux Channels 1~3
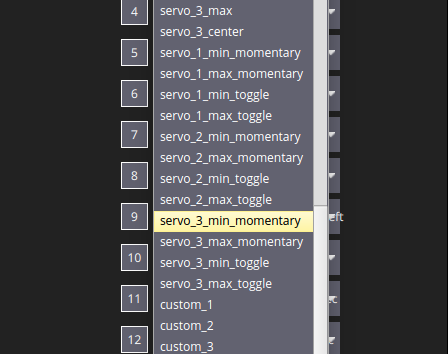
在QGC的Joystick设置中选择需要配置的按键功能为:
servo_X_max_momentary (按下按键后机械手张开)
servo_X_min_momentary (按下按键后机械手闭合)
·此按键功能只支持AUX Channel 1~3
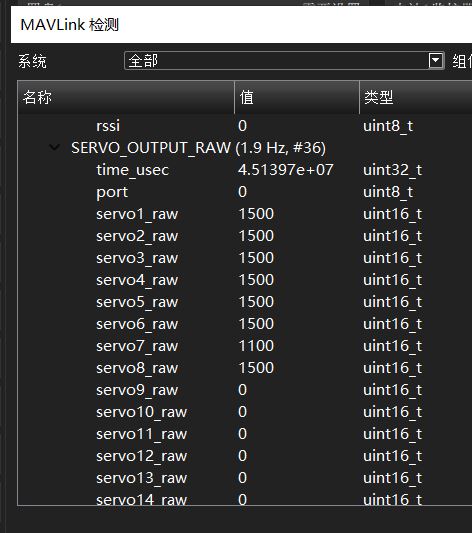
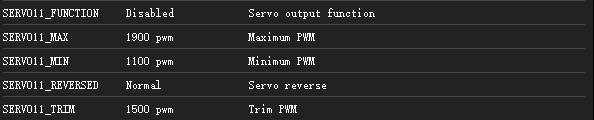
此时AUX通道输出PWM的高电平持续时间默认为:
servo_X_max_momentary(1900us)
servo_X_max_momentary(1100us)
对应机械手的张开和闭合信号
图为配置AUX Channel3
例:机械手连接到Pixhawk的AUX Channel3
选择按键功能为servo_3_min_momentary(按键闭合)
你好,我有一个小舵机按这个方法配置没有问题,但是有一个机械手的舵机用相同方法配置就无法控制,请问这个可能出在什么地方
机械手的舵机指的是哪种的舵机呢? 如上的配置方法是配置淘宝店内的机械手的。可能是配置上有不同。
舵机就是你家的那个大号舵机,700多那个
舵机这边的接线是怎么样的呢?
如果硬件连接上没有问题的话,
一般软件上的配置是修改下PWM输出频率和按键对应的功能。
PIX的PWM输出频率默认是200HZ。
pwm输出频率在parameter中从RC_SPEED 更改。
![]()
按键功能是配置对应通道的最大占空比和最小占空比。
接线的话就是红接电源正,黑接飞控负然后两头同时接电源负,黄接飞控信号端
我把机械手接到主通道8用的相机云台那个通道,能够正常供电,并且爪子张开到最大,但是我用操纵云台的按键就没法控制它
应该是配置的问题,关于PIX通道设置建议参考下论坛的这个帖子
你好,里面有一个用什么MAVLINK的DO_SERVO什么的来操作这个是什么意思?