首先,致敬bluerobotics团队对水下机器人探索的贡献。
开发三电机版本的同时,希望在blue开源机器的基础上做出一些激进的设计。
和三电机版本同样,完全开源。
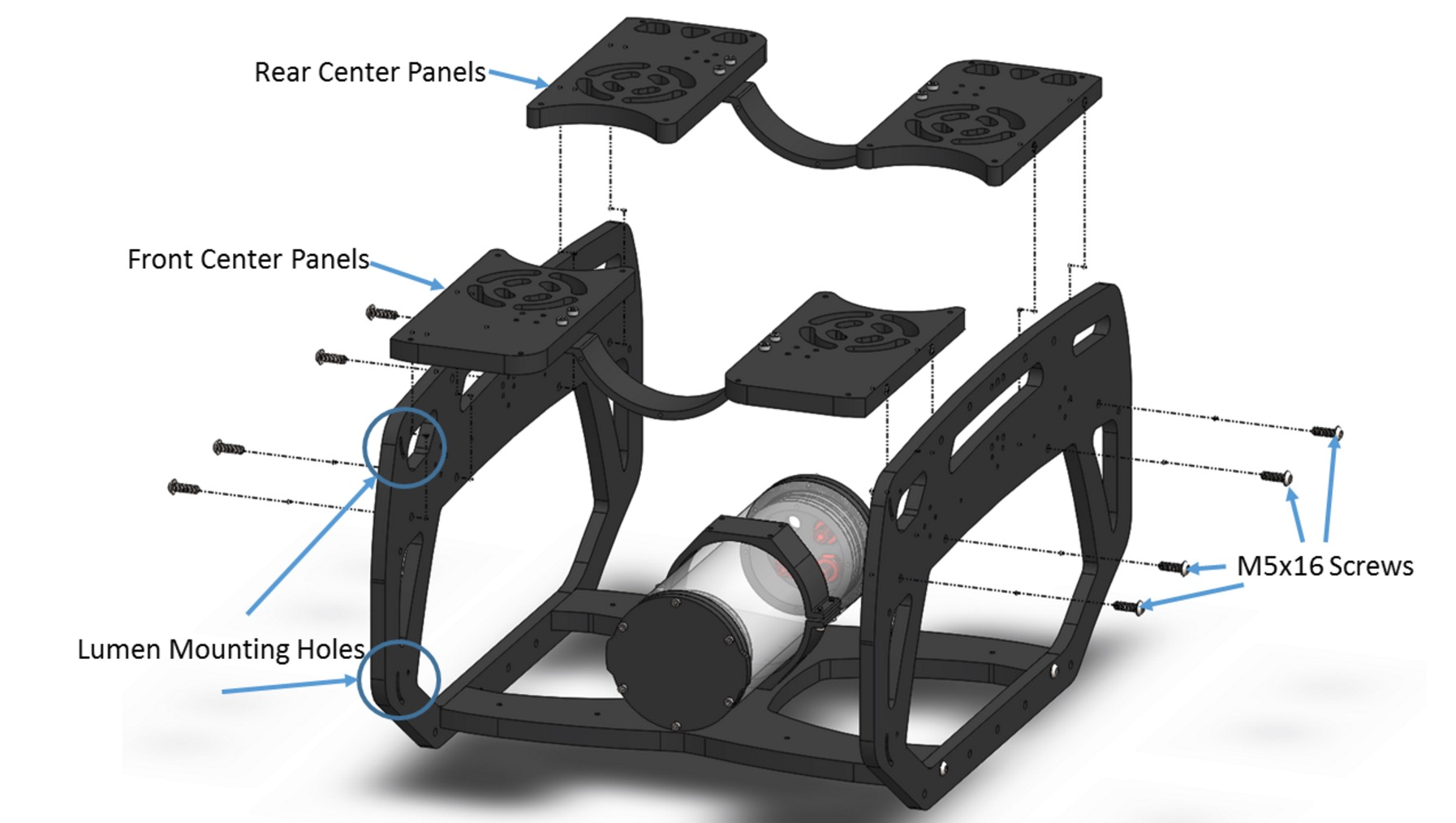
开始一周至今的结构设计进度:
相对三电机版,操控性会有哪些提升?
三个电机很难定点,六个电机增加了几个自由度的操作,也更容易定深和定点。
这个好,我喜欢
期待更新
机加工和HDPE框架切割加工完毕。切割的框架表面没有保护好,不太好看。
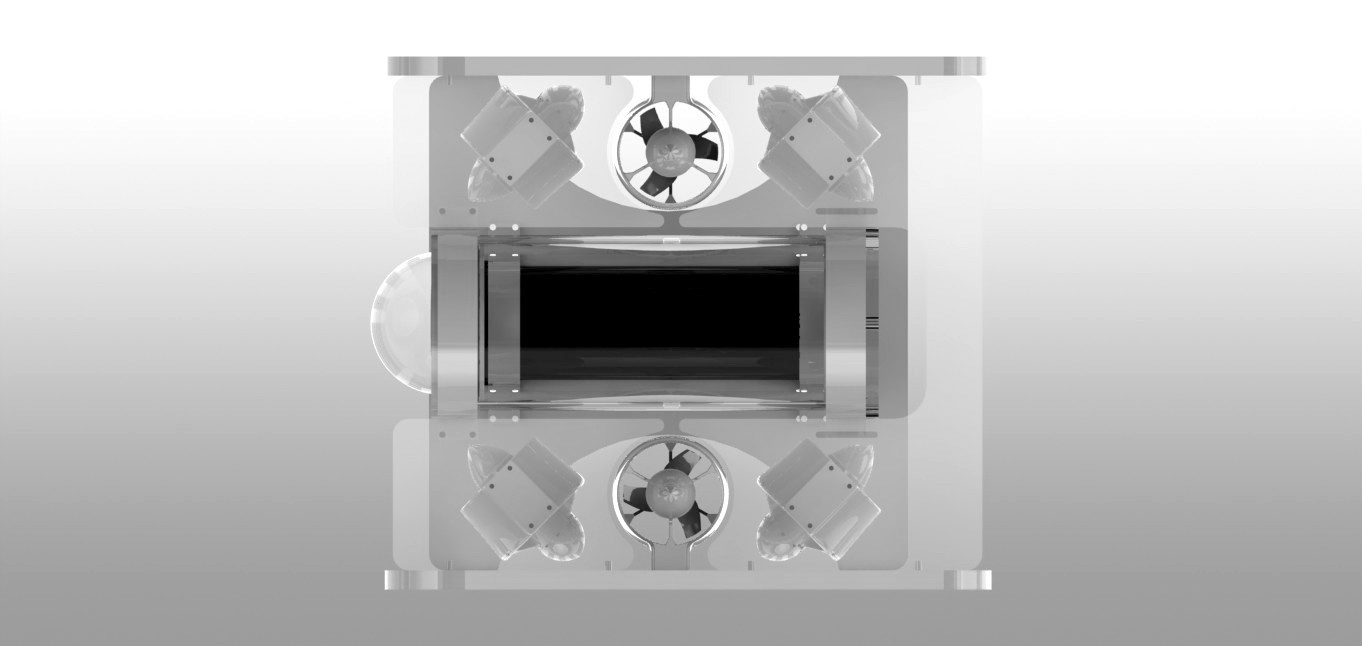
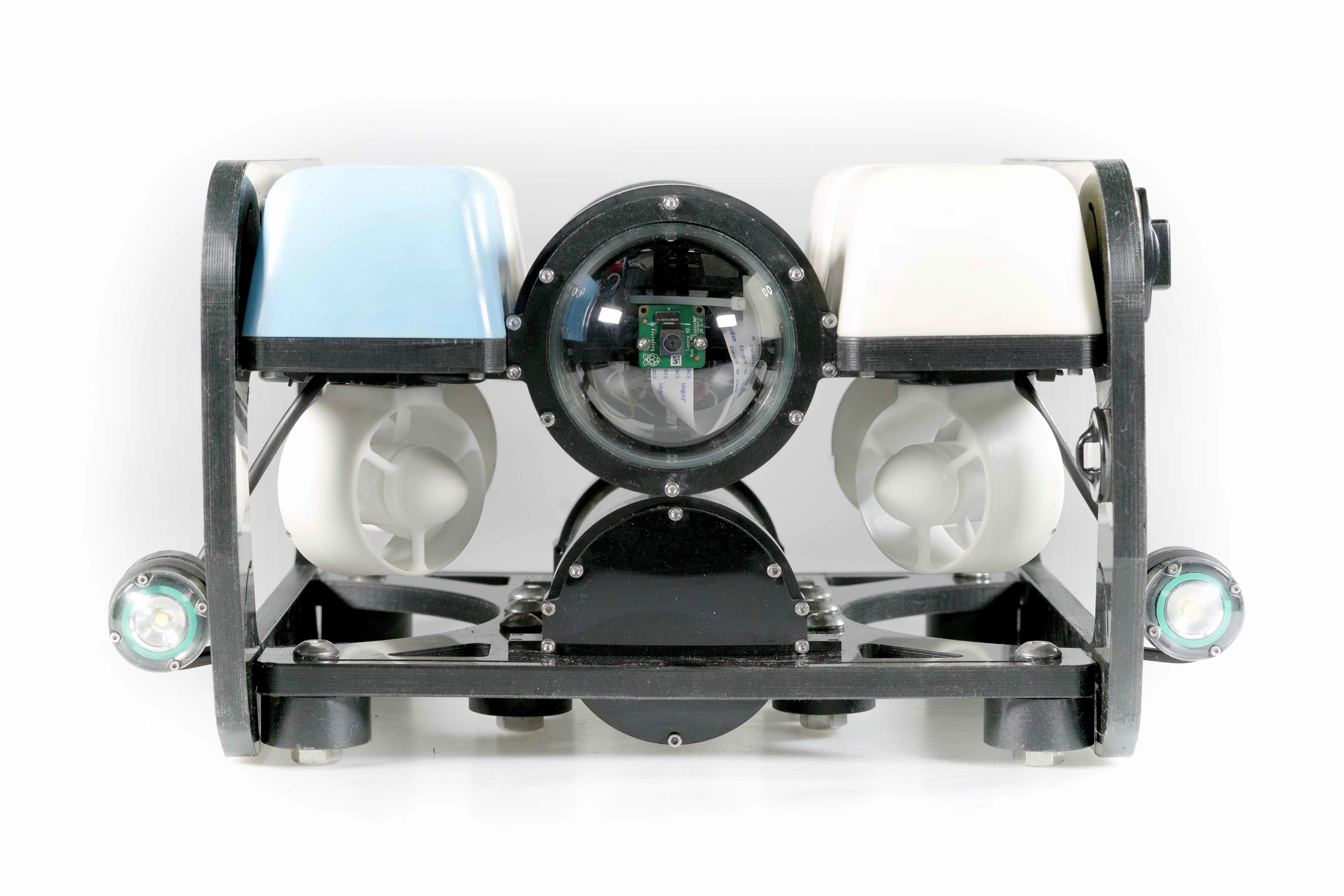
组装后的照片:
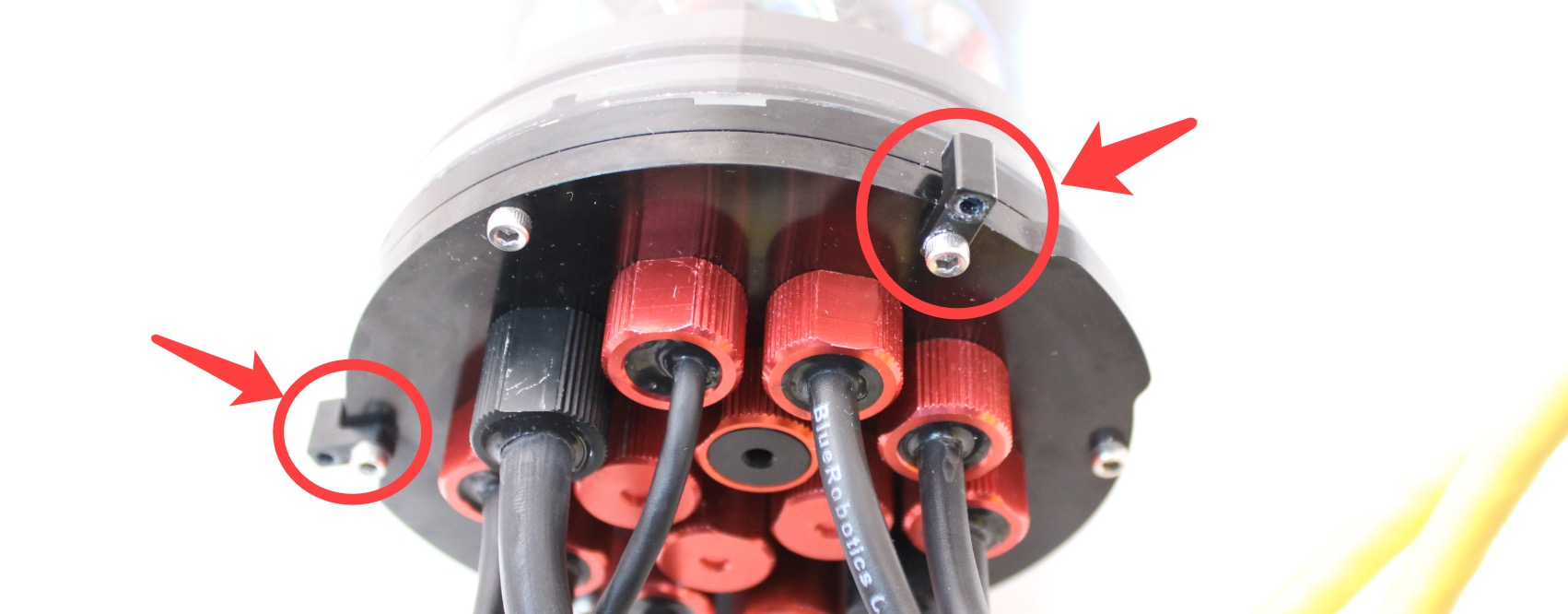
blue的这种安装方法非常不可靠,舱体固定比较弱,两面的法兰没有横向的力拉紧。
两面的法兰压进去之后,容易拉开。
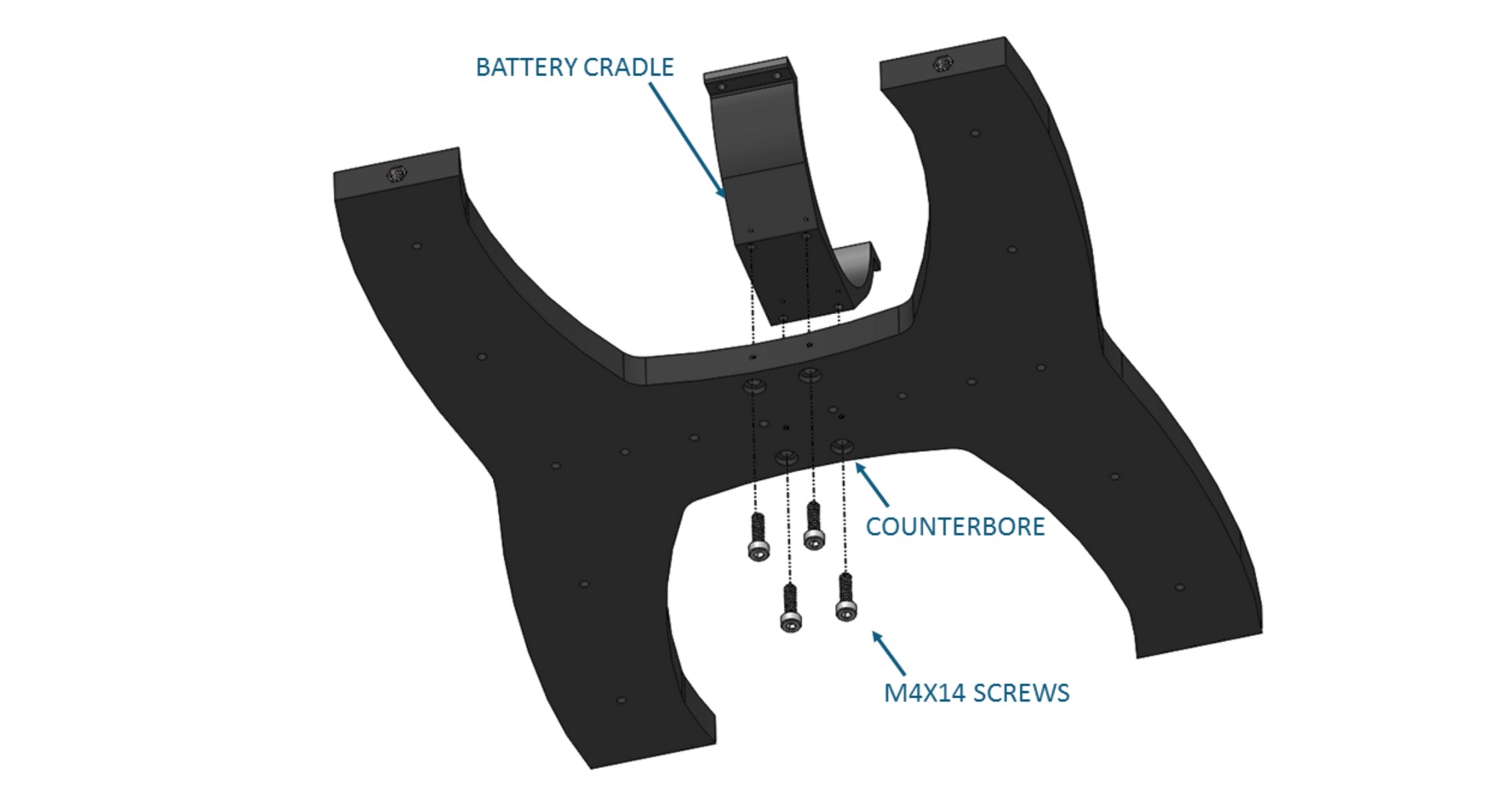
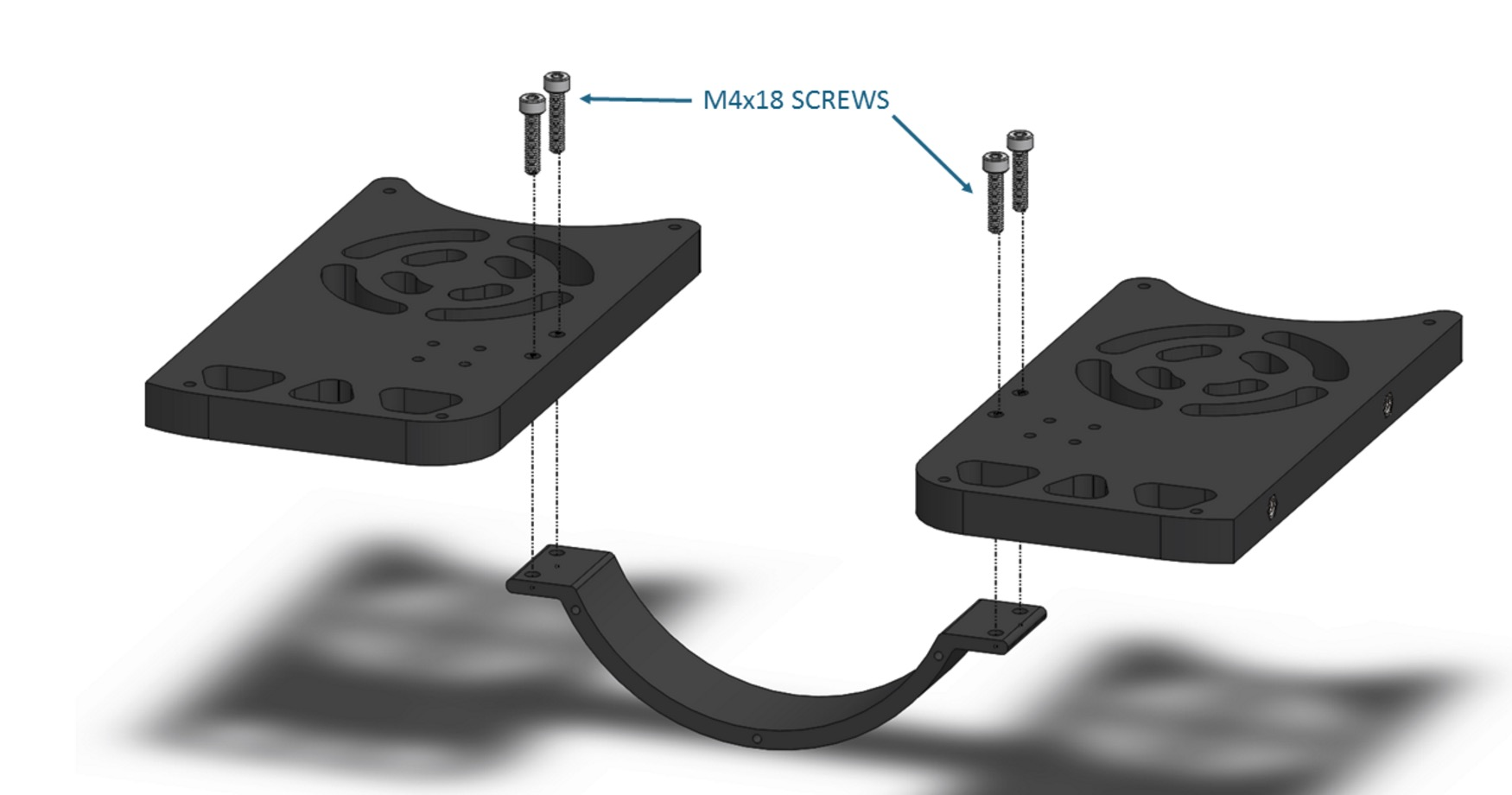
改进:
blue的连接方法:
改进:
改进:
改进:
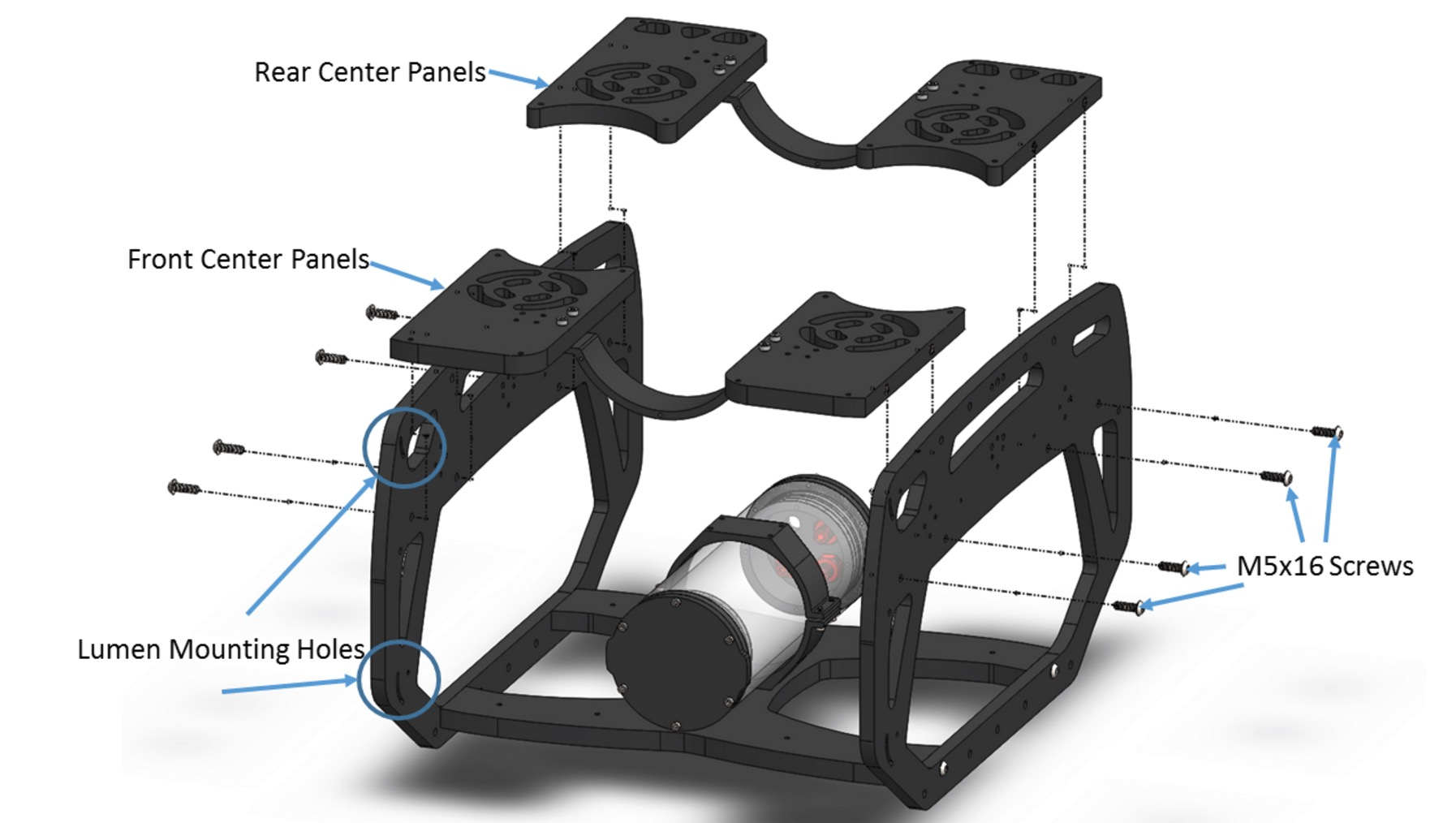
顶部留有提手槽和捆绑槽。
做的真好。
那个水下机器人的航插咋选的,现在市面上ip68级别够不??
我想请问,一个水平位置的四个电机呈45度角的布置方式相比较于4个电机笔直朝前、后和笔直左、右有什么优势?
ip68不行,需要用水密插头,要用明确标注耐压达到100米以上或者千米的。
一方面,45度排除了水流阻挡。
其次,运动上可以实现中心自旋。
另外,各个方向的运动速度四个电机正反转叠加更快。
做的不错,可以商用了,控制通讯也是用开源的吗?
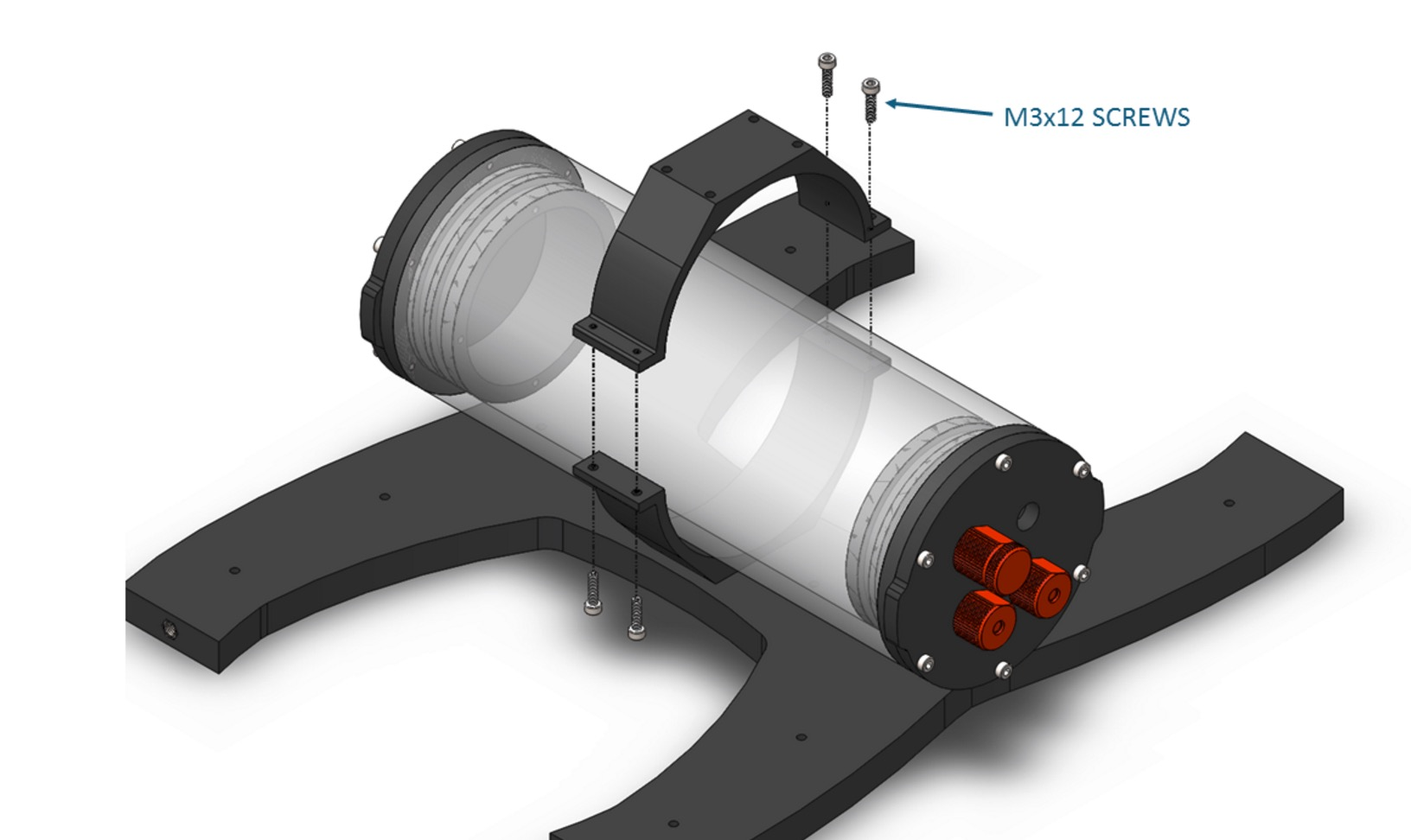
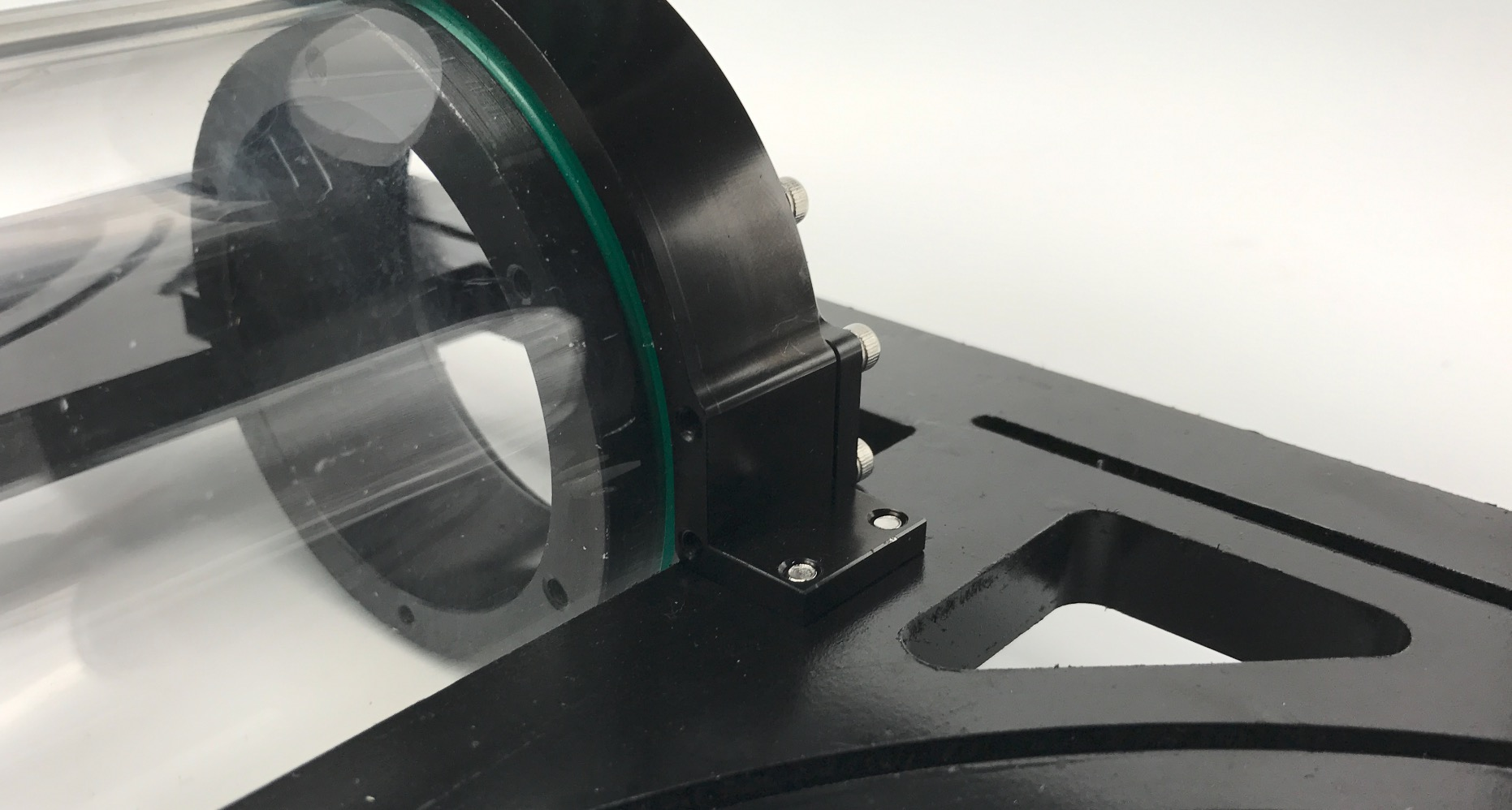
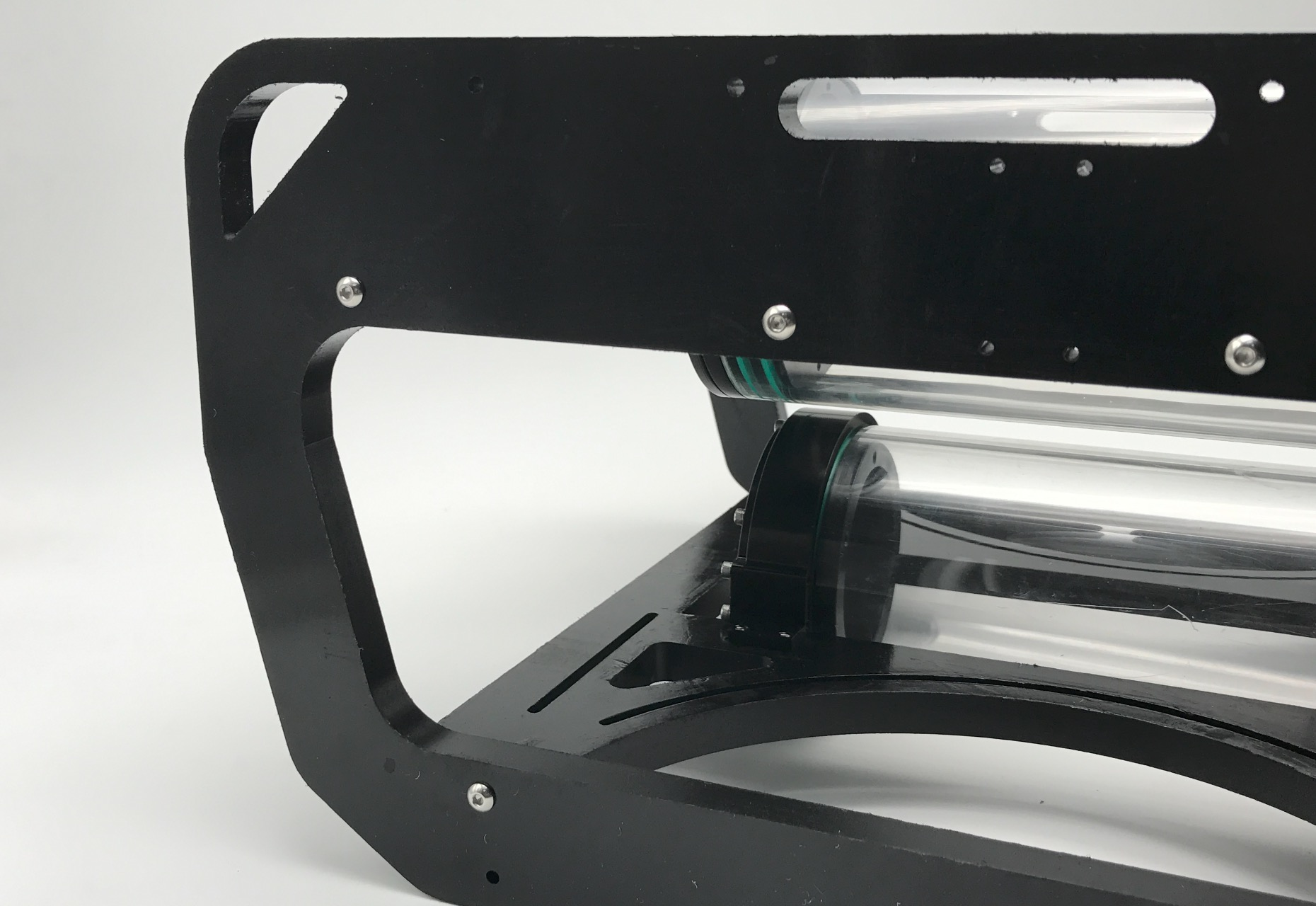
请问主舱是怎么固定到框架上的呢?
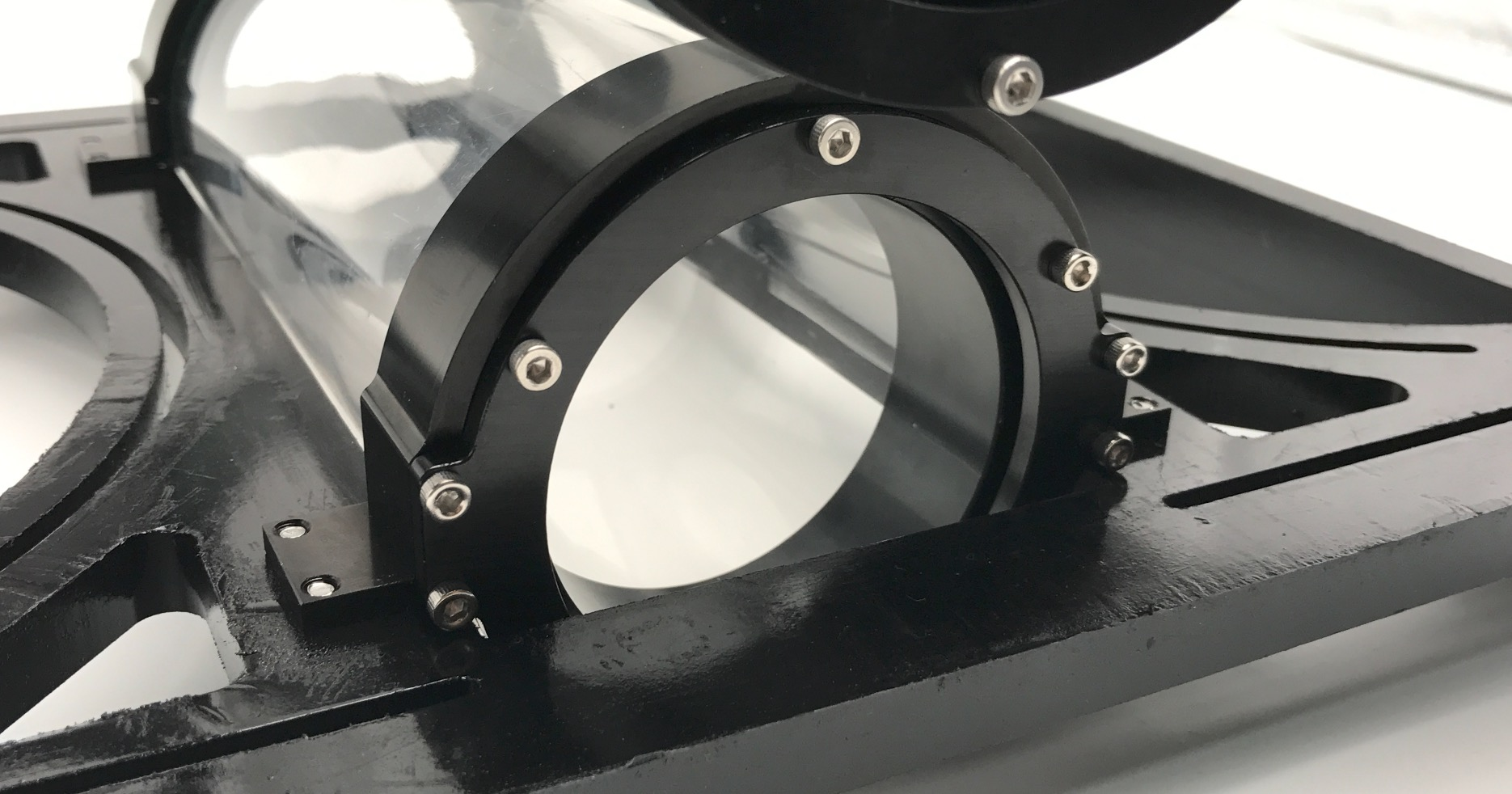
注意看图片,有个半圆环,半圆环合法兰的固定环先用螺丝固定,然后半圆环又固定到了机架上。
噢,确实是,都是黑色的一开始没看清楚,感谢解答~
想请问楼主:您使用的控制器现在是pix+sub3.4固件吗? 现阶段是否有控制器+套件出售?
45° 矢量布置 ,可以实现左右平移
同问:smiley:
@tony @liuning326 是的,pix和最新的ardusub固件,控制器和套件暂时还没整理完,有很多说明书标准化包装没完成。不过所有的零件都可以购买得到(有些还没有上架不过有的),问我们的淘宝客服就可以的。