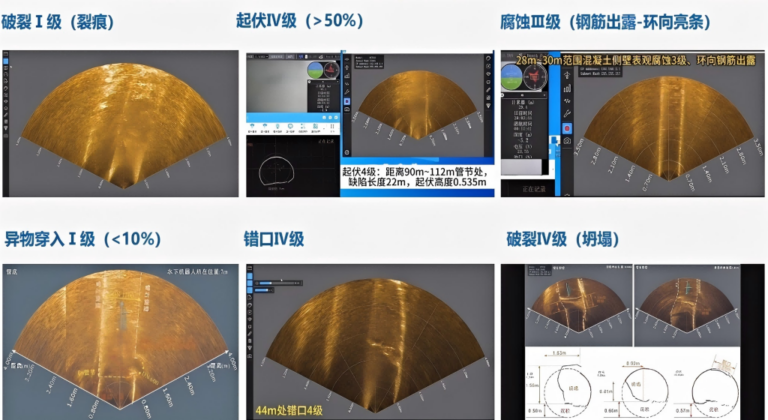
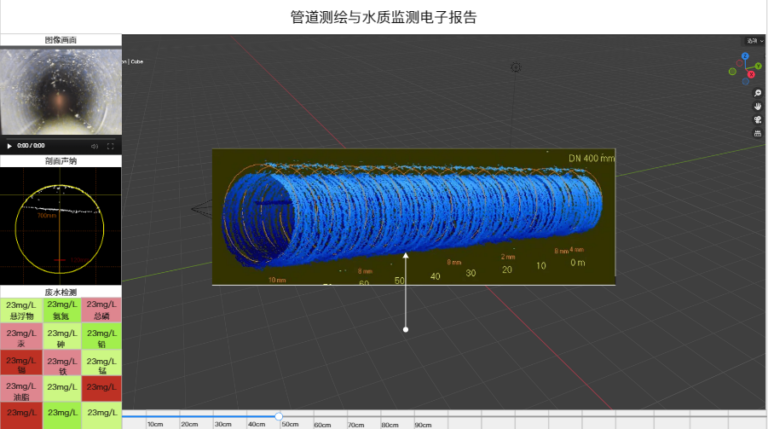
一、管道常见病害 地下管道的长期运行,会产生很多的问题,主要有以下几种: 1.管道堵塞:排水管道中出现很多污泥,会影响管道排水的顺利通行,容易造成城市内涝,对市民的出行和生活产生影响。还会发出难闻的味道,污染城市环境。 2.管道破损:如果管道发生破损,而相关维修人员未及时发现,将会导致地下水被污染。管道破损还会造成周围的泥土大量流失,逐步形成地下空洞,一旦有承载较重的车辆行驶,将会导致路面受到严重的损坏,影响其他车辆的通行。 3.管道老化与腐蚀:管道长时间使用和暴露在环境中,会导致材料老化和腐 蚀。常见的材料老化问题包括管壁变薄、裂缝,而腐蚀主要是由于化学物质、酸碱侵蚀或电化学反应引起。老化和腐蚀的管道经受外力冲击、土壤沉降等因素的影响,可能发生断裂。断裂可能导致渗漏和排水管道的分离。 二、工况分析 结合现场工况调研和实践经验,满水管道作业环境恶劣、未知因素较多,基于作业环境分析和多维感知、数据处理的需要,初步形成满水管道水下检测设备的功能需求分析思路。 1.现场作业环境: ①满水干管水量大,流速高 ②满水干管埋深大,水位高 ③水质浑浊、腐蚀性强 ④现状管网老化严重,存在工业企业偷排、漏排现象 ⑤存在井室暗埋、井口过小或偏心、接驳推测等制约 ⑥管道淤积厚,通行空间受限 ⑦水体杂物多 管道满水状态检测效果 2.现场检测案例: 2024年12月25日,在常州市武进区夏溪镇某试验基地,根据现代检测技术的工作原理、采用的检测设备和客户需求模拟高水位管网复杂水下环境,将管道机器人Sniffer放入池塘约50米的管道内进行检测,目的为检验管道机器人作业,实现管道内侧管壁成像等智能化检测技术的实战效能。 本次检测的主要内容是常州一粟高水位管网多维度智能感知系统,即机器人搭载高清摄像头、图像声呐等组合感知系统开展模拟管道的水下检测,管道机器人多模块化设计适配检测场景,可在满水、流动水条件下完成高精度检测。同时,配备了智能水下数据采集系统及数据处理软件,能够提供准确可靠的检测结果,极大地提升了检测效率和准确性。 通过Sniffer在管道内进行前进或上浮的姿态,在检测过程中,保持原地状态使用遥控手柄来调整摄像头上下左右,观测管道时可看到水中漂浮物,实现成像画面如下。 智能系统可自动识别管道缺陷、淤泥、接口问题及雨污混合等隐患,并生成标准化报告,为管网智能运维提供数据支撑。根据Sniffer检测过程中收集的数据分析,此管道内水质报告如下图所示。通过智能化运维转型、标准化检测流程及动态清理技术,突破传统人工效率低、环境适应性差的瓶颈,为高端制造业精准检测需求提供支撑。 三、管道机器人Sniffer 1.产品介绍 Sniffer针对城镇水务运维中的检测难、数据缺、效率低等痛点,专为城市排水管倒设计。多用于管径200~2000mm的排水管道。检测人员通过手柄操控在管道内的水下进退、上下、左右,旋转转向等,控制摄像头的旋转、变焦及灯光照明等,并将管道内部的3D姿态模拟,实时显示本体在水下的运动姿态、朝向方位等信号通过线缆传输到主控上。 该机器人集成了多项创新技术:搭载高清摄像头、图像声呐、避障系统及浑水可视系统等先进传感器,采用模块化设计,可根据不同检测需求灵活配置,实现满水、流动水条件下的高精度检测,实时传输视频等数据,检测人员可监测管道内部状况,同时将原始图像记录存储下来,而且具有实时位置反馈功能。配备智能水下数据采集系统及处理软件,可自动识别管道内缺陷并生成专业报告。 点击下载彩页 2.产品参数外形尺寸566*527*527本体照明2个LED灯,每个大于≥3000流明,8种亮度等级重量11kg航速1m/s主体框架6061-T6,和PETG控制方向游戏手柄控制四个推进器不同转速,实现上下左右的方向调整水密仓体材质PTEG和6061-T6工作温度0℃~40℃推进器4个,四个推进器呈扇形分布电池供电锂电粒电池,续航≥2小时水平推力最大29.4kg摄像分辨1920*1080@30FPS,镜头视角100° 3. Sniffer优势 ①无需暂停管段使用并进行排水、冲洗工作,就可在满水或较高水位情况下对管道的检测; ②摄像机分辨率高、拍摄图像更清晰、直观显示管道实况和结构缺陷; ③安全性高节省人工,提高效率和精度; ④防护等级高,防水锈防腐蚀,实时传输检测数据和定位; ⑤可检测出同一位置,不同场所污水排放中所含的杂质。