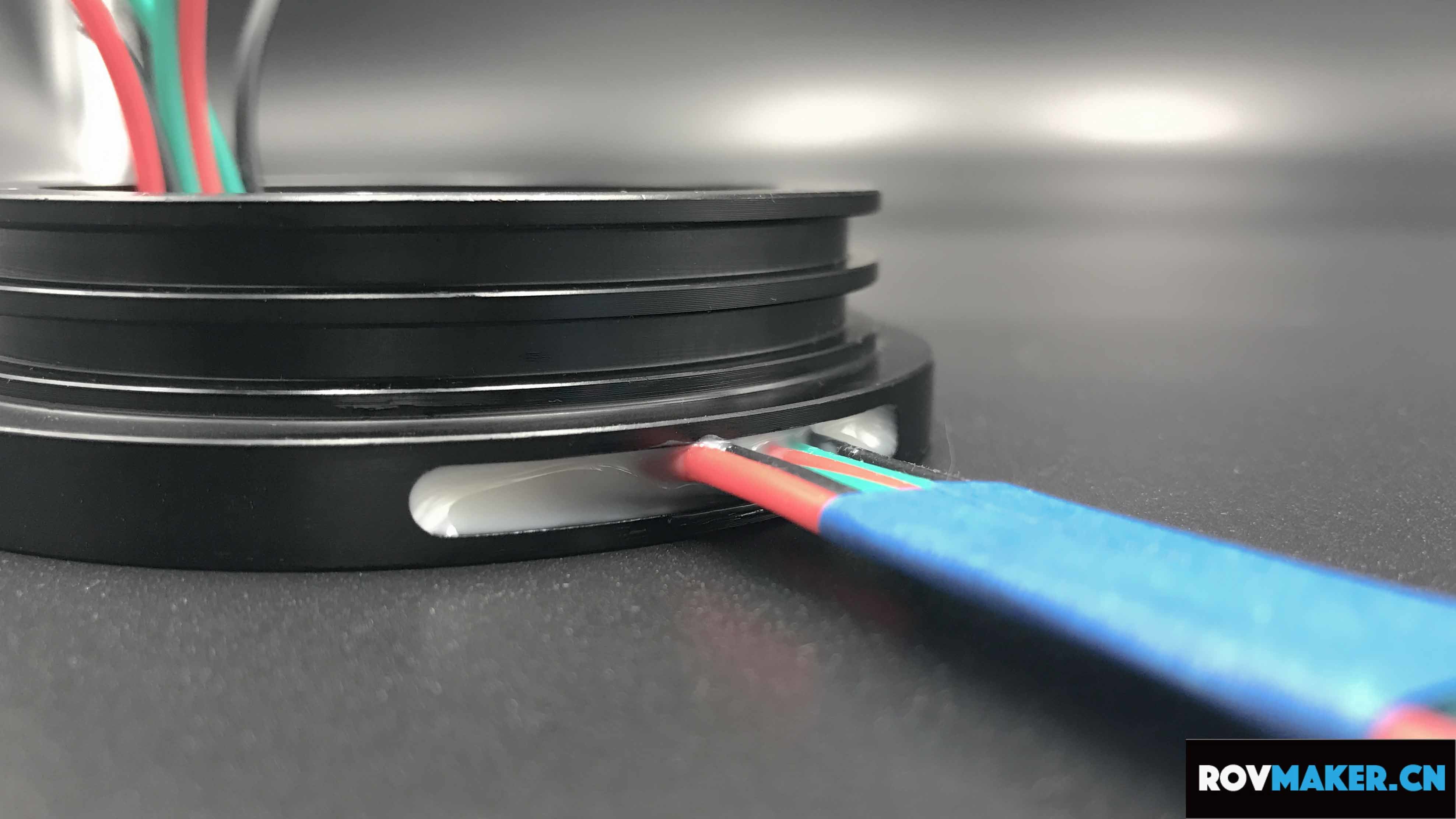
这个出线怎么处理的>也是通过灌封的吗?
没错,最近做一份说明
你的亚克力是在哪里加工的呀还是自己打印的0.0能交流一下吗
我们有一台激光切割机用来切亚克力,可以帮你切割,从淘宝给材料费就可以了。
2 个赞
螺旋桨的护罩是亚克力材料的吗
电机的外壳是光固化3d打印的,用的是韧性类的高强度ABS材料。
1 个赞

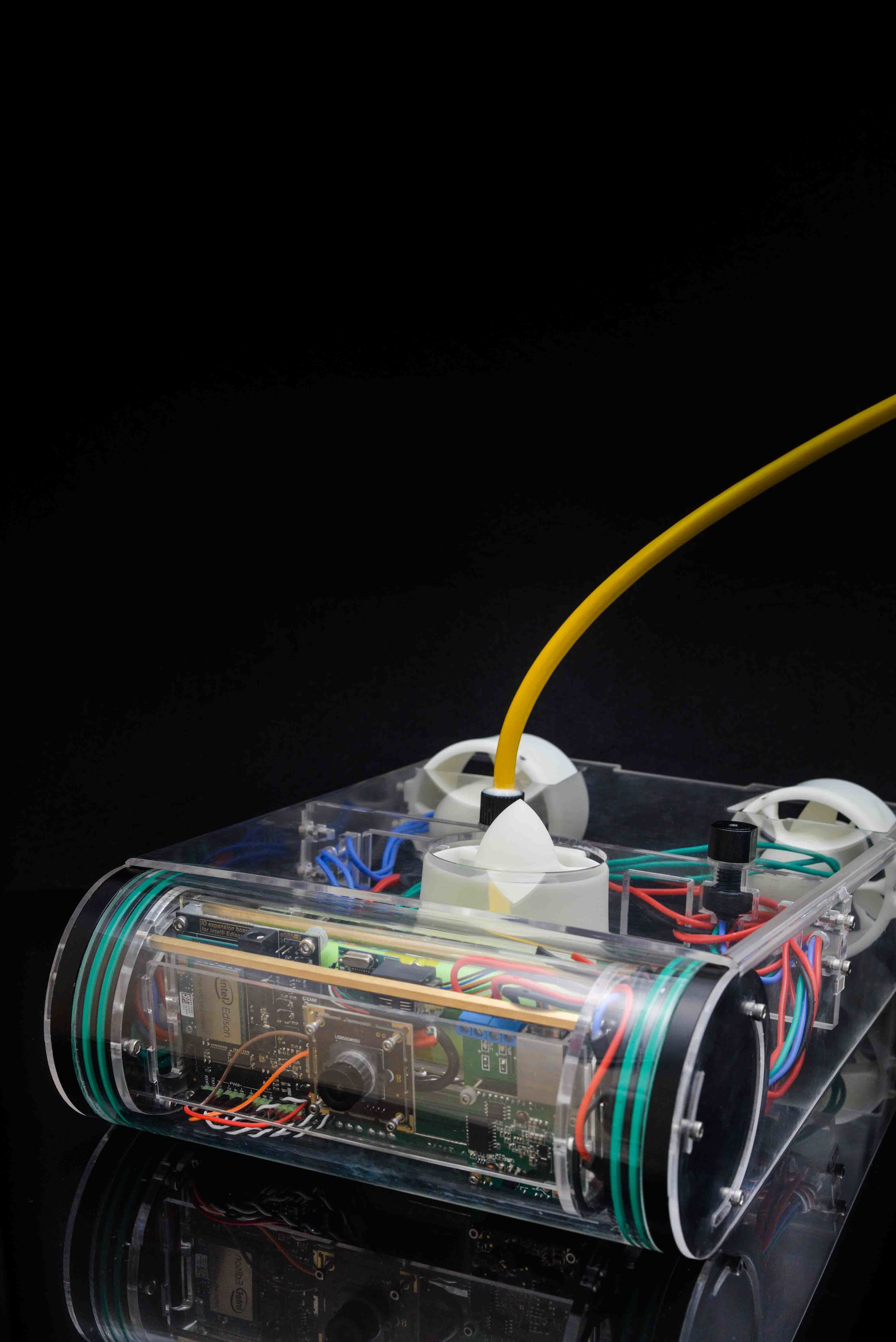
舱盖部分的接线方案帖子标题:
「新版本穿线密封舱」舱盖详细使用方法
http://ocg6jvu8h.qnssl.com/uploads/default/original/1X/a192cb3ee0a74f9c15d2b979a357ffc40d8f7921.jpg
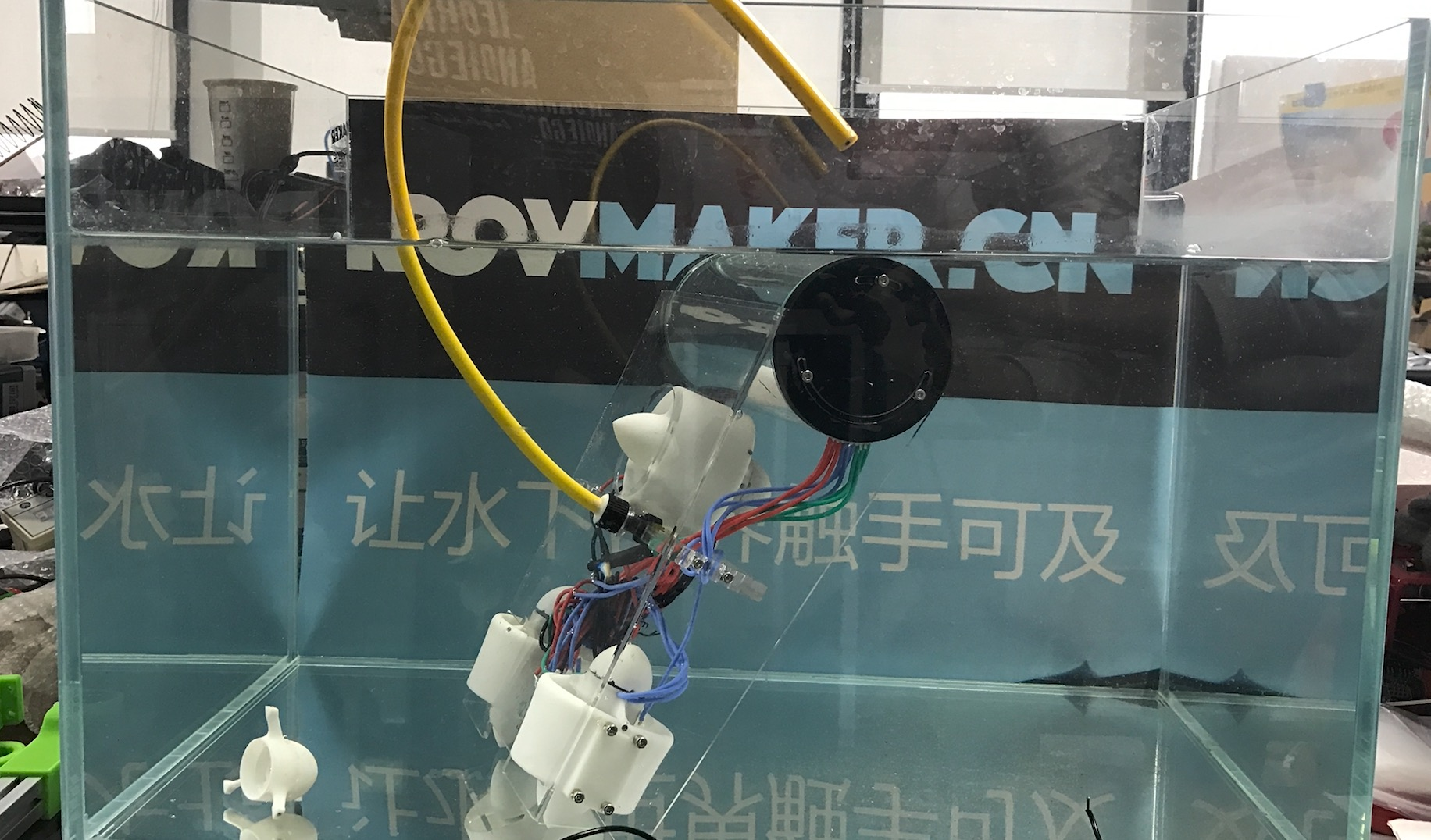
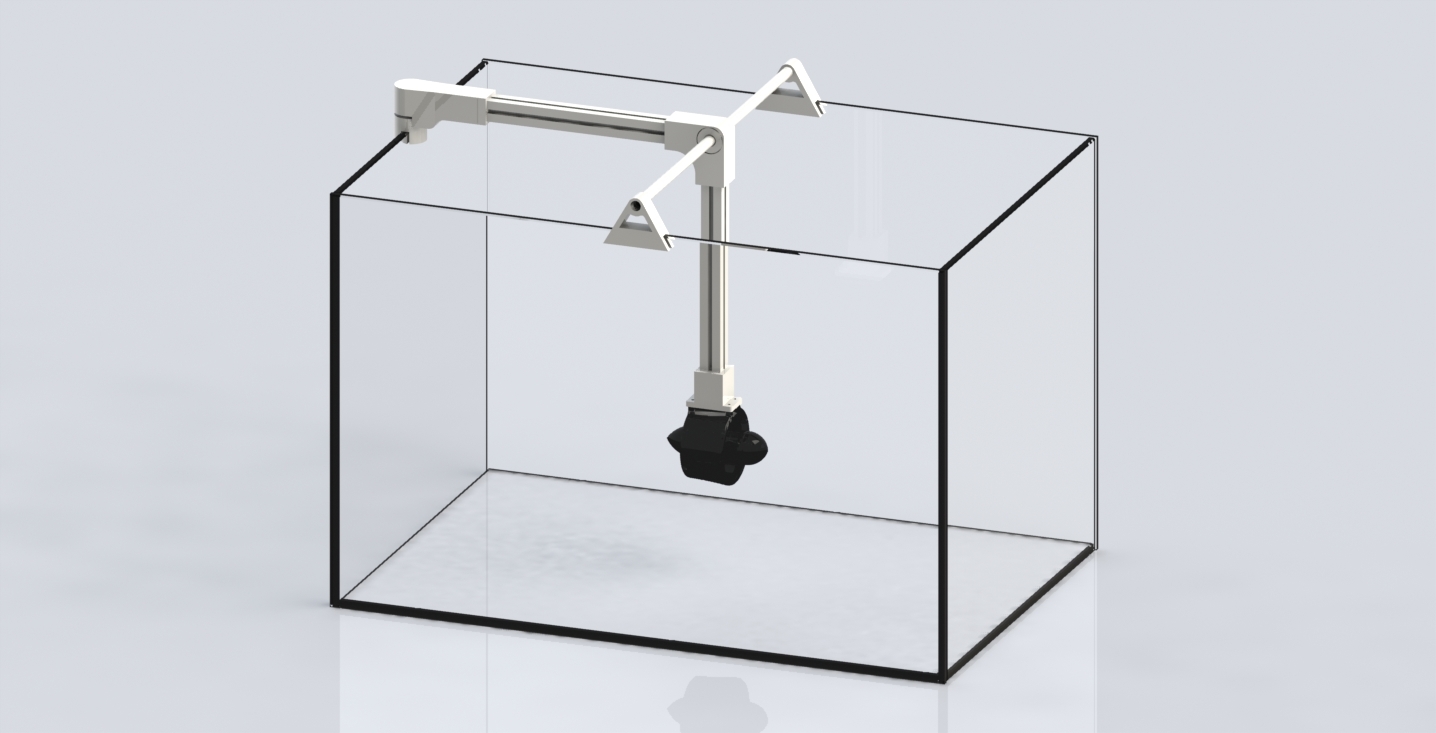
电机防水应该在压力缸里做,这个只能用来测推力吧
是的,这个是用来测试电机推力曲线和各种曲线参数的。
真棒,这里能学到好多东西
推进器外壳的方案更新
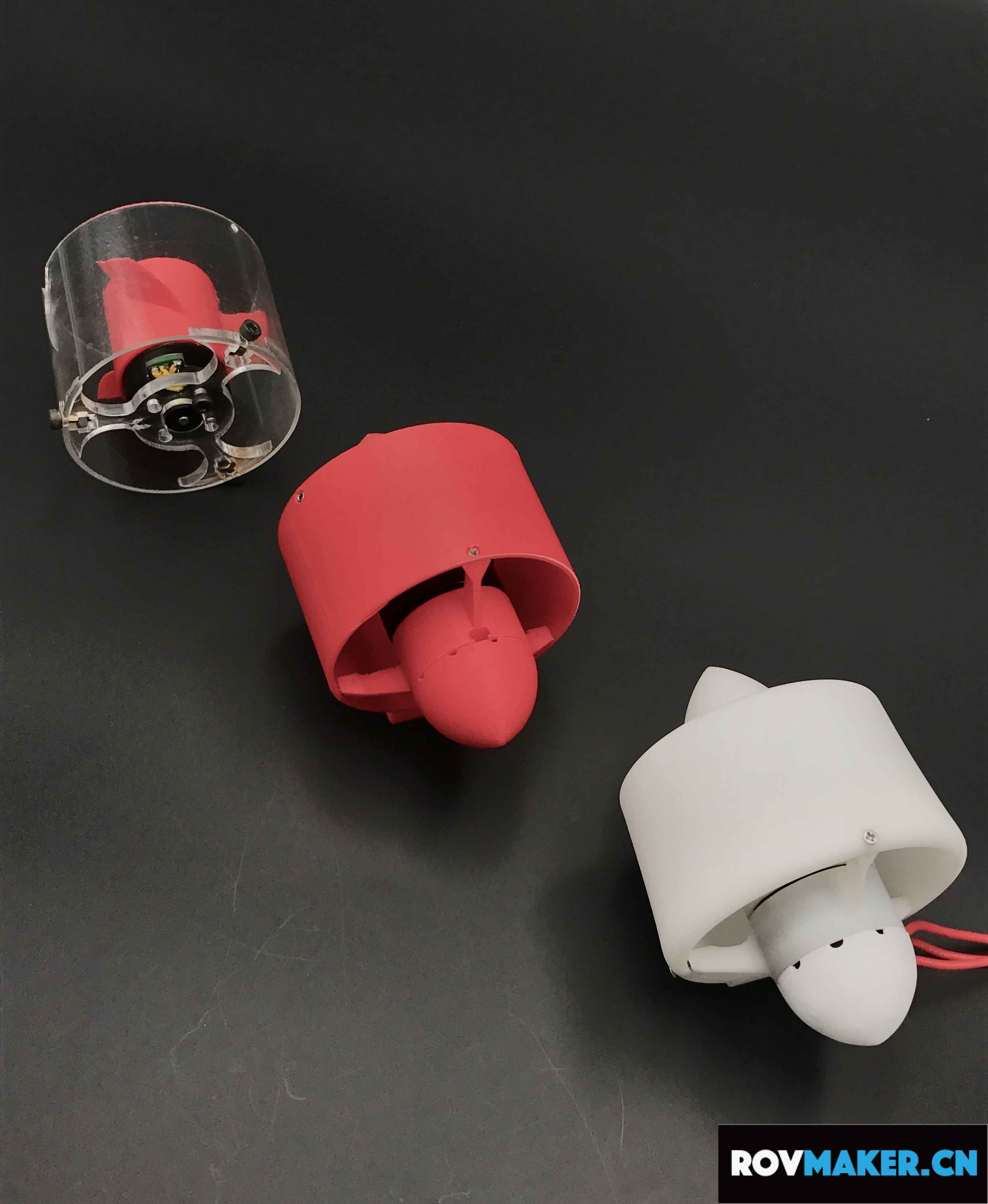
第一版本亚克力管和激光切割的安装支架,第二版本fdm打印外壳,第三版本光固化打印。
以下是光固化第一版本,已经又改了一些细节,比如接线方向和出线端的密封开口。
大概放几张图片,另外开贴开源详细的安装操作方法。

大概测试20v下两公斤左右推力。14.8v电压下电流4.7a,推力一公斤左右。

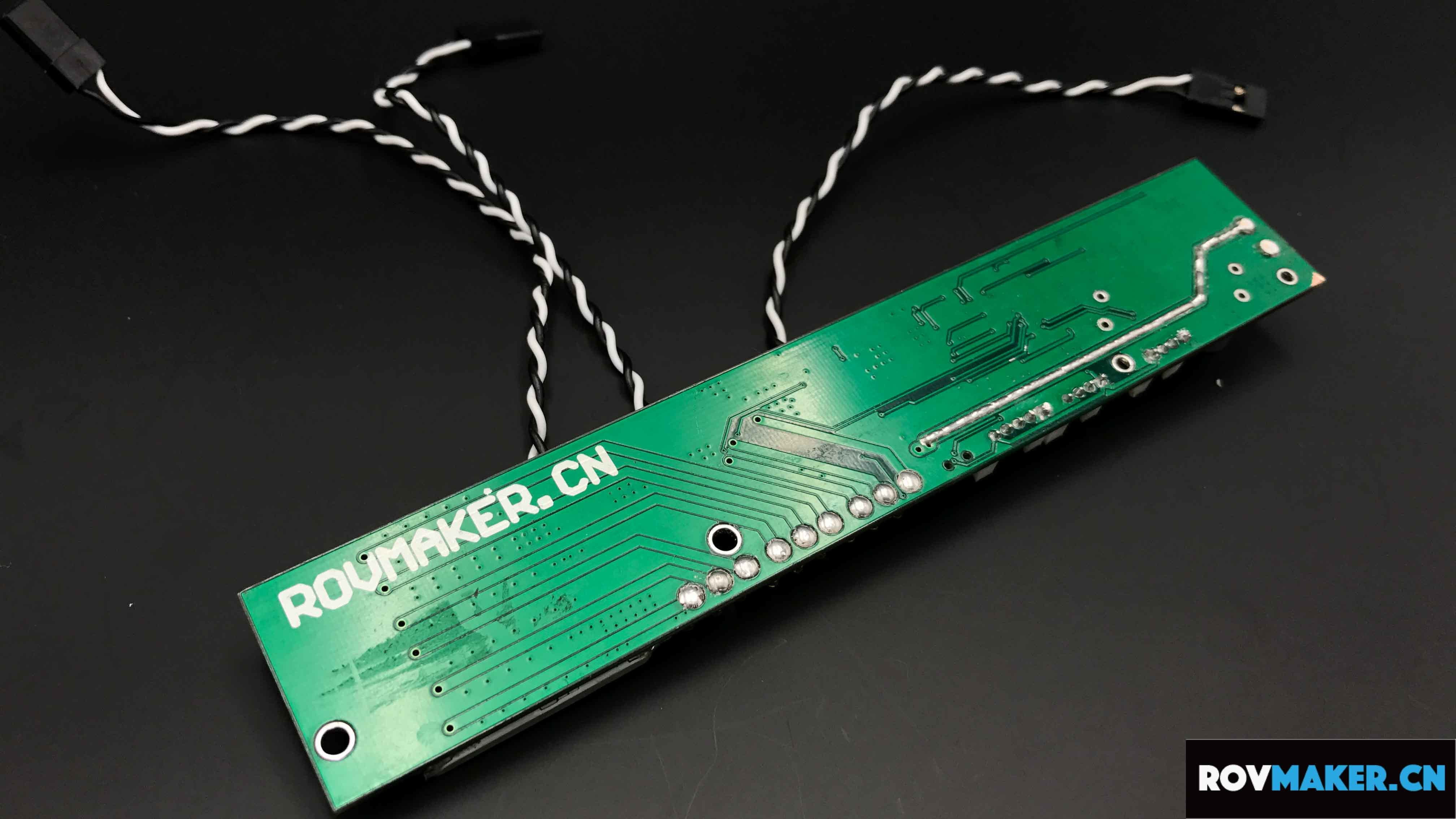
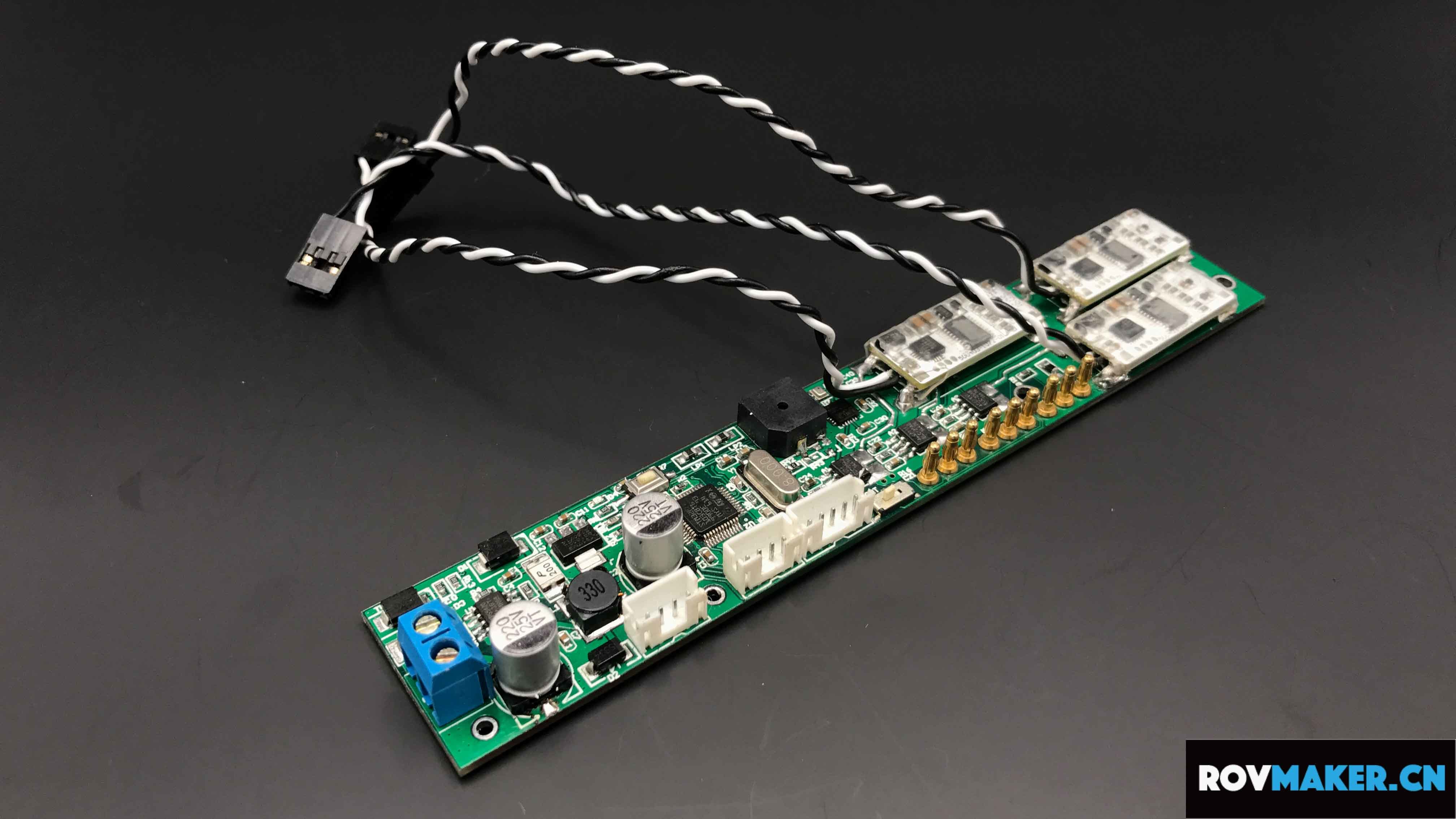
stm32协处理器的pcb第二个版本,发现一些问题,正在更改。三个板载电调,香蕉头连接电机。
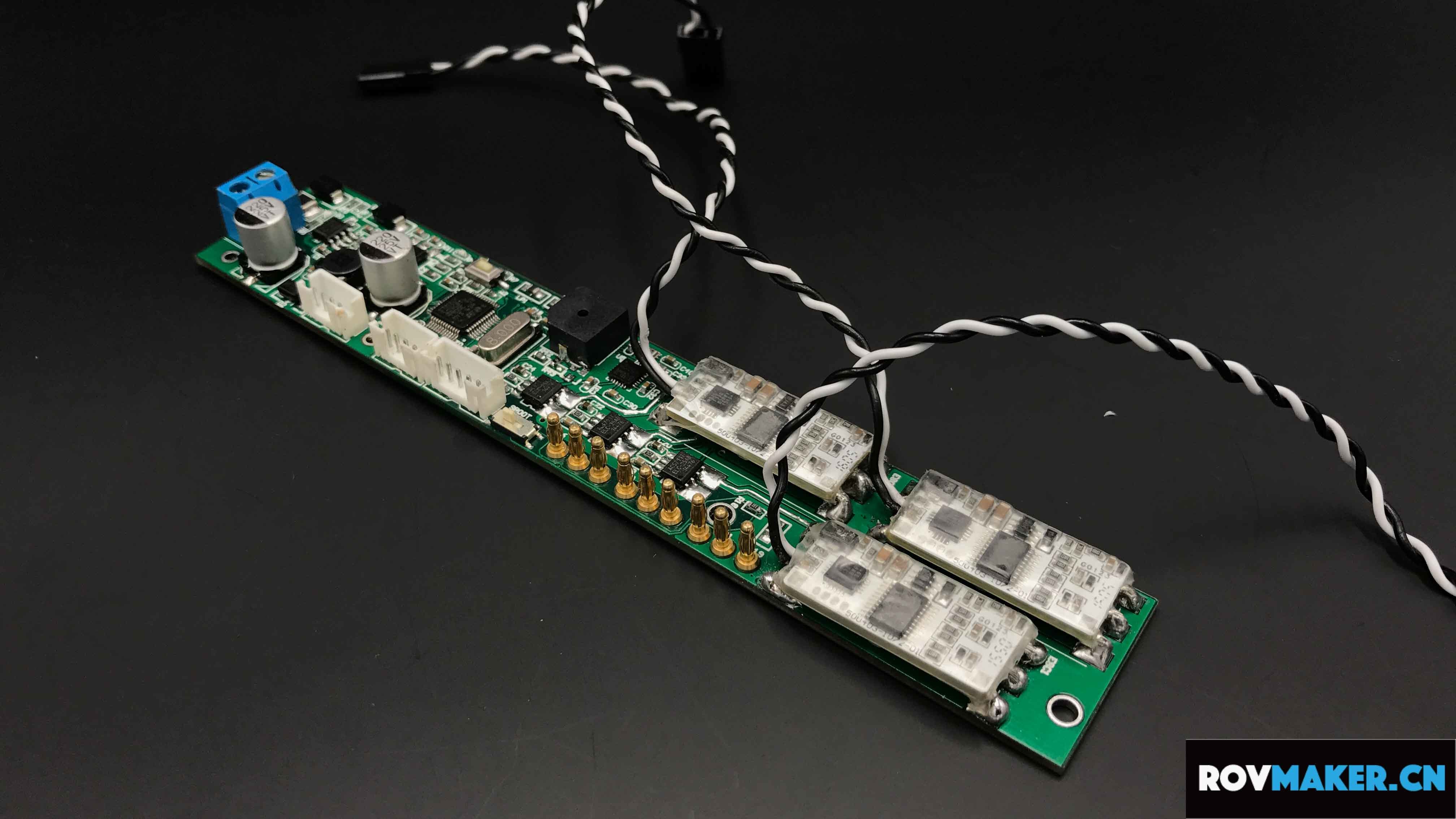
功能包括:
电池电压实时检测蜂鸣器报警
舱体内部漏水检测气压传感器
陀螺仪和姿态解算
舱外深度传感器解算
三路电调的电流电压检测
电源管理
等。。
所有传感器数据通过串口发送给edison主控。
1 个赞
还没上架呀,赶紧哦,期待中。
楼主你们公司在哪里?
楼主做的很棒,对于消费级别水下机器人生态圈的推进做了很大贡献!
你好,我们在常州新北区